Bernsteini teooria on lühike. Bernsteini teooria N. Liikumiste ehitustasandite teooria. N.A.Bernstein ja koera korrigeerimise orientatsioon treeneri poolt
Liikumise ülesehituse tasemed - NA Bernstein (1896-1966) näitas ja tõestas oma uurimistööga, et motoorne aktiivsus ei toimu mitte reflekskaare kaudu (nagu Pavlov ja tema järgijad uskusid), vaid nn refleksrõnga kaudu (tagasiside olemasolu tõttu). . See võimaldas Bernsteinil luua põhjendatud ja tõestatud teooria liikumiste taseme ehitamisest.
Peamised ideed
1. Konkreetse liikumise korraldamisse kaasatakse tavaliselt korraga mitu tasandit: see, millele liikumine on üles ehitatud, ja kõik selle aluseks olevad. Teatud mõttes sarnaneb see sõjalise operatsiooniga: selle üldine käik ja ülesanded määratakse ühel juhtimistasandil, see ja madalamad osalevad tavaliselt operatsiooni läbiviimises, lõpetades sooritajatega (sõduritega).
2. Ühte ja sama liikumist saab üles ehitada erinevatele juhttasanditele (erinevate tasandite algatatud), erineva soorituskvaliteediga, kuid siiski sama. Näiteks jooksmist saab ehitada tasemele C, D või E. Esimesel juhul ei kontrolli jooksu iseärasusi peaaegu teadvus, see peegeldab lihtsat "jooksu" või "jooksmist sinna". Teisel ja kolmandal juhul on teadvuse kontroll jooksuprotsessi üle palju suurem: juhitakse jooksmise spetsiifilisi iseärasusi, suhtlemist mõne objektiga (näiteks jalgpalliga) või isegi jooksmise kasutamist ruumis mitte liikumiseks. , kuid mõne keeruka ülesande puhul (näiteks saab treener teie jooksuga kujutada, kuidas mõni teine jookseb; lõpuks saab jooksmisega - kui väga soovite - isegi morsekoodi edastada).
3. Liikumiskonstruktsiooni tasanditel on kesknärvisüsteemi eraldiseisvates "kihtides" "alaline elukoht", milles on esile tõstetud seljaaju, pikliku, subkortikaalsete keskuste ja ajukoore tasemed. Iga tase on seotud spetsiifiliste, fülogeneetiliselt arenenud motoorsete ilmingutega, igal tasandil on oma liigutuste klass.
Tase A
Toonuse tase. Kõige madalam ja fülogeneetiliselt kõige iidsem (selle juuri tuleb otsida kaugest minevikust, mil elav on just liikuma õppinud). Inimestel vastutab see lihaste toonuse eest. See tase võtab vastu signaale lihaste proprioretseptoritelt, teatades seega lihaspinge astmest. Selle taseme tüüpiline iseseisev ilming on kehavärinad külmast või hirmust.
Tase B
Sünergia tase. Saades infot tasemelt A, aga ka "installatsioone" kõrgematelt tasemetelt, korraldab see tasand "ajutiste ansamblite" (sünergia) tööd. See tähendab, et selle taseme peamine ülesanne on koordineerida üksikute lihaste pinget. Selle taseme tüüpiline iseseisev ilming on venitamine, tahtmatud näoilmed, lihtsad refleksid (näiteks käe kuuma käest eemaletõmbamine).
Tase C
Ruumivälja tasand. Tase C saab informatsiooni B-tasemelt, "hoiakud" kõrgematelt tasanditelt ning lisaks – mis on väga oluline – kogub meeltelt kogu olemasoleva info välisruumi kohta. Sellel tasemel ehitatakse üles lihtsad, mitteobjektiivsed liikumised ruumis. Jooksmine, kätega vehkimine on tüüpilised iseseisvad ilmingud.
Tase D
Sisuliste tegevuste tase. Selle lokaliseerimine on juba ajukoores. Ta vastutab objektidega suhtlemise korraldamise eest. Sealhulgas sellel tasemel lükatakse kogemuste tulemusena edasi ideed ümbritsevate objektide põhiliste füüsiliste omaduste kohta. Selle tasandi toimimiseks on suur tähtsus eesmärgi mõistel ehk objektide soovitud asendil tegevuse tulemusena.
Tase E
Intellektuaalsete motoorsete tegude tase. Kõrgeim tase. See tase hõlmab selliseid liigutusi nagu kõne, kirjutamine, sümboolne või kodeeritud kõne. Teatud mõttes võiks seda tasandit nimetada “mitteobjektiivseks”, sest erinevalt tasemest D ei määra siin liikumisi mitte objektiivne, vaid abstraktne tähendus. Kui inimene kirjutab näiteks oma sõbrale märkuse, siis füüsiliselt puutub ta kokku ainult paberi ja pliiatsiga, kuid paberile tekkiva joone määrab terve abstraktsete tähenduste galaktika: puuduva idee. isik, tema isikuomadused, eesmärgid ja eesmärgid seoses selle isikuga, võimalus neid eesmärke ja eesmärke kirjalikult realiseerida, aga ka muid tähendusi.
Kõik inimtegevused väljenduvad liigutustes.
Liikumine on psühhofüsioloogiliste funktsioonide kompleks, mida rakendab inimese dünaamiline aparaat.
Tänu liigutustele mõjutab inimene maailma ja muudab seda, kuid muutuvad ka liigutused ise.
Rubinstein rõhutab: inimese liigutused on võime sooritada tegevust, mis on suunatud konkreetse ülesande lahendamisele. Ülesande olemus või sisu määrab liikumise.
Alates Sechenovi ajast on eristatud vabatahtlikku ja tahtmatut.
Liikumise põhiomadused:
- Kiirus;
- Jõud;
- Tempo
- Rütm
- Täpsus ja täpsus
- Plastilisus ja väledus
Liikumistüübid
Rubinstein tõstab esile 6 tüüpi liigutusi:
- Asendi liikumine (lihaseaparaat) - staatilised refleksid, mis tagavad kehahoiaku säilitamise ja muutmise;
- Liikumisliikumine(seotud liikumisega) - eristuvad tunnused kõnnakus ja kehaasendis;
- Väljenduslikud näo- ja kehaliigutused(näoilmed ja pantomiim);
- Semantilised liigutused(näiteks mütsi peast võtmine, kätlemine);
- Kõne kui motoorne funktsioon(dünaamika, rütm, intonatsioon, rõhk);
- Töölisliikumine- liikumised, mis esinevad erinevat tüüpi tööoperatsioonides.
arendas välja inimese liikumiste ja tegevuste organiseerimise mehhanismide probleemi. Enne teda oli klassikaline füsioloogia. Bernstein lõi mitteklassikalise füsioloogia.
Erinevus klassikalise ja mitteklassikalise füsioloogia vahel:
- Klassikaline füsioloogia tugineb S-R mudeli mehhanismile;
- Klassikaline füsioloogia on loomafüsioloogia, kus on kaasa aidanud reaktiivsuse printsiip. Tal oli praktikaga vähe kokkupuudet. Mitteklassikaline füsioloogia pöördus inimeste uurimise poole. Objekt uuringud olid normaalse, terve organismi loomulikud liikumised.
- Bernsteini füsioloogia põhines terviklikkuse põhimõttel. Ta väitis Pavloviga, et refleks ei ole tegevuse element, vaid elementaarne tegevus, terviklik tegu, mis algab ja jätkub kuni lõpuni.
- Bernstein vastandas aktiivsusprintsiibi reaktiivsuse printsiibile. See tähendab, et kõik vastuvõtuprotsessid (energia vastuvõtmine) ja keskused, mis töötlevad teavet, on tegevuse ilming.
1947. aastal ilmus raamat "Ehitamise liikumisest".
1966. aastal, surmaaastal Aleksander Nikolajevitš Bernstein, ilmus tema viimane raamat "Esseesid liigutuste füsioloogiast ja tegevuse füsioloogiast" selle kontseptsiooni pärast.
Mõiste "vajaliku tuleviku mudel"
Aleksander Nikolajevitš Bernstein võttis kasutusele mõiste "nõutud tuleviku mudel", pidades seda üheks elusorganismi maailma kuvamise vormiks. Teine vorm on mineviku ja oleviku peegeldus. Koos sellega "peegeldab" (konstrueerib) aju veel reaalsuseks saamata eesootava olukorda, mida ta bioloogilised vajadused ärgitavad realiseerima. Ainult selge ettekujutus vajalikust tulevikust saab olla aluseks probleemi sõnastamisel ja selle lahenduse programmeerimisel.
Erinevalt kujunenud mudelist on tulevikumudelil tõenäosuslik iseloom.
Sensoorsete korrektsioonide põhimõte
Bernstein pakkus välja täiesti uue liikumisjuhtimise põhimõtte, nimetades seda sensoorsete korrektsioonide põhimõtteks. See viitab motoorsete impulsside korrektsioonidele, mis põhinevad sensoorsel teabel liikumise käigu kohta. Mis tahes keeruka liikumise tulemus ei sõltu ainult tegelikest juhtsignaalidest, vaid ka mitmetest lisateguritest. Nende tegurite ühine omadus on teha muudatusi kavandatud liigutuste käigus. Liikumine, ka kõige elementaarsem, on alati üles ehitatud "siin ja praegu" ning ei järgne automaatselt – iga kord sama asja – selle põhjustanud stiimulile.
Liikumise lõppeesmärk on saavutatav ainult siis, kui sellesse pidevalt parandusi (parandusi) tehakse. Kesknärvisüsteem peab teadma, milline on jooksva liikumise tegelik saatus, see tähendab, et sellesse peavad pidevalt sisenema aferentsed signaalid, mis sisaldavad teavet liikumise tegeliku käigu kohta, ja seejärel töötlema neid korrigeerivateks signaalideks.
Liikumise kulgu mõjutavad tegurid:
- Reaktiivsed jõud- tahtmatud reaktsioonid, mis esinevad lihaste, kõõluste, luude jne süsteemides. Tugevalt käega vehkides tekivad teistes kehaosades reaktiivjõud, mis muudavad nende asendit ja toonust. Näiteks kui laps ronib diivanile ja hakkab sellelt palli viskama, siis palli visates saab ta ise diivanilt maha lennata.
- Inertsiaalsed jõud- kui tõstate oma käe järsult üles, siis see tõuseb ainult nende motoorsete impulsside tõttu, mis lihasesse saadetakse, kuid mingist hetkest liiguvad need inertsist (st kauem kui vaja).
- Välised jõud(väline takistus) - need on takistused, mis võivad programmi täitmist takistada. Kui liikumine on suunatud objektile, vastab see tingimata selle vastupanule, mis pole alati etteaimatav.
- Lihaste esialgne seisund- (see on käe asend, lihaste kokkutõmbumise aste jne) olek muutub liikumise käigus koos selle pikkuse muutumisega, samuti selle väsimuse tagajärjel jne. sama juhtimpulss võib lihasesse sattudes avaldada täiesti erinevaid motoorseid mõjusid.
Kõigi nende tegurite toime määrab vajaduse pideva teabe arvestuse järele liikumisaparaadi seisundi ja liikumise otsese kulgemise kohta. Seda teavet nimetati Tagasiside signaalid ... Liikumiste tagasisidesignaalid on sageli paralleelsed, see tähendab, et neid võetakse korraga vastu mitme kanali kaudu. Näiteks kui inimene kõnnib, tunneb ta lihasmeele abil oma samme ja samal ajal näeb ja kuuleb neid.
Liikumise ülesehituse tasemed
Bernstein on liikumiste konstrueerimise tasandite teooria looja. Ta leidis, et olenevalt sellest, millist infot tagasisidesignaalid kannavad, jõuavad aferentsed signaalid aju erinevatesse sensoorsetesse keskustesse ja lülituvad vastavalt erinevatel tasanditel motoorsele radadele.
Taset tuleks mõista kui kesknärvisüsteemi morfoloogilisi "kihte". Nii tuvastati seljaaju ja pikliku medulla tase, subkortikaalsete keskuste tase ja ajukoore tase.
Igal tasandil on spetsiifilised ainult sellele omased motoorsed ilmingud, see rakendab oma liikumisklassi.
Tase A- madalaim ja fülogeneetiliselt vanim ( rubrospinaalne)... Sellele tasemele signaale saadakse lihaste proprioretseptoritelt(keha lihastes asuvad retseptorid), mis annavad teada lihaspinge astmest, aga ka tasakaaluorganitest.
Tase A osaleb mis tahes liikumise korraldamises koos teiste tasanditega ega juhi peaaegu kunagi inimest... On liigutusi, mida reguleerib sõltumatult tase A: tahtmatu värisemine, hammaste krigistamine külmast ja hirmust, viiuldaja sõrme värisemine jne.
Tase B- Bernsteini kutsutakse sünergia taset(kreeka keelest. koos tegutsemine; sünergistid on lihased, mis toimivad koos ühe kindla liigutuse läbiviimiseks). Anatoomilise substraadi nime järgi nimetatakse seda talamo-pallidaarne... Sellel tasemel töödeldakse lihaste-liigese retseptorite signaale, mis annavad teada kehaosade suhtelisest asendist ja liigutustest.
Tase B osaleb kõrgema taseme liikumiste korraldamises, võttes ülesande enda peale sisemine koordinatsioon, kogu keha kõrgelt koordineeritud liigutused. Ta vastutab erinevate motoorsete oskuste, ekspressiivsete näoilmete ja pantoomiliste liigutuste automatiseerimise eest, ekspressiivselt värvitud... Selle taseme õiged liikumised hõlmavad neid, mis ei nõua välisruumi arvestamist: vabavõimlemine, venitus, miimika jne.
Tase C- Bernstein helistab ruumivälja tase. Anatoomilise substraadi nime järgi - püramiidne striaal... See saab vastu signaalid nägemisest, kuulmisest, puudutusest, see tähendab kogu teabest välisruumi kohta... Need on kõik nihkeliigutused: kõndimine, ronimine, jooksmine, hüppamine, erinevad akrobaatilised liigutused, pallivise, tennisemäng, sihtimisliigutused (piljardimäng, teleskoobi sihtimine).
Tase D - objektiivse tegevuse tase... seda kortikaalne tase... Anatoomilise substraadi nime järgi - parieto-premotoorne... Tema vastutab esemetega tegevuste organiseerimine ja on inimesele omane... See sisaldab kõik tööriistatoimingud, kõik igapäevased liigutused, töö, autojuhtimine. Selle taseme liigutused on kooskõlas subjekti loogikaga. See ei ole niivõrd liikumine kui tegevus. Nendes pole mootori koostist fikseeritud, vaid lõpptulemus määratakse. Selle taseme jaoks on toimingu sooritamise meetod, motoorsete toimingute komplekt ükskõikne.... Näiteks saab pudeli avada korgitseriga, korgi saab põhja lüües välja lüüa, korgi sisse lükata jne. Kõikidel juhtudel on tulemus sama.
Tase E - intellektuaalsete ja motoorsete tegude tase, Esiteks kõneliigutused, kirjutamisliigutused, sümboolse kõne liigutused (kurtide ja tummade žestid). Liikumiste anatoomiline substraat sellel tasemel ei ole väga selge, kuid Bernstein rõhutas osalemist eesmine ajukoor aju, viidates Luria tööle.
Tuleks kaaluda:
- Keeruliste tegevuste korraldamisse on kaasatud mitu tasandit. Seda, millel tegevused põhinevad, nimetatakse juhiks ja ülejäänud on aluseks.
- Formaalselt saab ühte ja sama tegevust üles ehitada erinevatel tasanditel. Näiteks saab ringikujulise käeliigutuse saavutada tasemel A või tasemel B või tasemel C või tasemel.
Mis määrab hoone liikumise fakti ühel või teisel tasandil?
Liikumise ülesehitamise juhtiva taseme määrab liikumise tähendus või ülesanne. See tähendab, et füsioloogia määravad täiesti mittefüsioloogilised asjad, nimelt inimese tegevuse eesmärk.
Nii võttis Bernstein kasutusele organismi käitumise sihtmärgi määramise.
Bernsteini panus
Bernsteini ideed on psühholoogia jaoks väga olulised. Ta andis suure panuse mitmesse psühholoogia harusse:
...
14. osa -
15. osa -
16. osa – toimingud ja liigutused. Hoone liikumise tasemed (N.A. Bernsteini järgi)
17. osa -
18. osa -
Liikumise ülesehituse tasemed. Sensoorsed korrektsioonid ja kaks interaktsioonitsüklit kui motoorse süsteemi eneseregulatsiooni põhimõte tervise ja haiguste korral. Oskuskasvatuse teooria. Liikumishäirete klassifikatsioon tserebraalparalüüsi korral puuduliku koordinatsioonitaseme alusel.
Liikumine on kvaliteet, mis on omane kõigile elusolenditele, olgu selleks siis vedeliku vool taimedes, vererakud veresoonkonnas, loomade ja inimeste liikumine ruumis või indiviidi sotsiaalselt tingitud tegevused.
Liikumise kujunemine, selle omaduste, nagu kiirus, täpsus, sujuvus jne, parandamine on protsess, mis järgib liigutuste ülesehituse universaalseid seadusi. See põhineb koordinatsiooni parandamisel (liiges - ladina keelest ordinatio - järjestamine, omavaheline sidumine, joondamine. Bioloogias - elundite ja kehaosade suhteline areng nende ajaloolises arengus).
Ehituse liikumise seadused defineeris esmakordselt meie kaasmaalane N.A. Bernstein neljakümnendatel-viiekümnendatel. Entsüklopeedia teatab: "Bernstein Nikolai Aleksandrovitš (1896-1966) - neuro- ja psühhofüsioloog, tegevuse füsioloogia looja. Tema uurimused liikumiste füsioloogiast said kaasaegse biomehaanika teoreetiliseks aluseks ja mõned tema ideed nägid ette mitmeid küberneetika sätteid. Tema tuletatud seaduste põhjal arenes teadus kunstlikest juhtimissüsteemidest, manipulaatoritest, robotitest. Kahjuks sarnaneb tema teaduslik saatus tollaste edumeelsete bioloogide ja geneetikute saatusega.
Seejärel dešifreerisid ja konkretiseerisid Bernsteini põhimõtted paljud uurijad (Anokhin P.K., Gurfinkel V.S., 1960 jt).
Inimliigutustel on oma arengus algus, periood, mil liikumise omadused (kiirus, täpsus jne) saavutavad täiuslikkuse, involutsioon - hääbumine, nende omaduste kadumine.
See põhimõte on kõige märgatavam liikumise, eelkõige kõndimise kujunemisel (liikumine - ladina keelest lokus - koht ja motio - liikumine. Bioloogias on see tsükliliselt korduv regulaarne automaatsete liigutuste summa, mis tagab aktiivse liikumise ruumis - kõndimine , ujumine, lindude lend jne).
Oleme kõik jälginud, kuidas 1–1,5-aastase lapse ebamugavad, ebatäpsed liigutused muutuvad 3–5-aastaseks omal moel armsaks ja graatsiliseks.
Puberteedieas muudavad hormonaalsed, häired jällegi liigutused nurgeliseks, teravaks, kohmakaks. Vananedes kuluvad juhtimismehhanismid ära, liigutused muutuvad pahuraks, ebakindlaks. Vanem inimene komistab tükk aega, enne kui bussi jalalaualt laskub, astudes üle lombi, justkui prooviks ruumi. Kõndimisel on stabiilsust üha raskem säilitada ja vana inimene lühendab tahtlikult sammu teisaldamise perioodi, kuna ühe jala toetamisega kaasneb sel hetkel stabiilsuse kaotuse oht - kõnnak muutub segavaks.
Emotsioonide tohutu mõju liigutuste mustrile on teada: vangi ja võitja kõndimine pole võrreldav, kuigi koosneb samadest struktuurielementidest. Baleriini, miimika liigutused on vaikne väljendus kogu tunnete spektrist tragöödiast triumfini, kõnet asendavad kurdid ja tuimad käte ja näo liigutused. Liikumised võivad kujutada surevat luike ja isegi sulanud jäätist ja kuivavat juustu.
Selline liikumise täiuslikkus ei ole päritud. Imikul puuduvad isa ja ema liigutuste kvalitatiivsed omadused. Ta läbib taas kogu liikumiste arengutee - kõige primitiivsematest kuni väga koordineeritud ja sotsiaalselt oluliste tegudeni. Mis on see tee, kuidas see on seotud ajustruktuuride ja perifeersete mehhanismide arenguga, kuidas toimub oskuste arendamine, liikumiskvaliteedi paranemine – neile küsimustele annab vastuse Bernsteini välja pakutud liigutuste konstrueerimise teooria. See sisaldab mitmeid põhisätteid:
esimene säte käsitleb liikumiste onto- ja fülogeneesi ühtsust; teine säte käsitleb liigutuste astmelist arengut, kesknärvisüsteemi liigutuste ülesehitamise taset;
kolmas säte puudutab refleksrõngast ja sensoorseid korrektsioone;
neljas säte on umbes kaks interaktsioonitsüklit; viies säte käsitleb oskuste arendamist.
Vaatleme üksikasjalikumalt kõiki neid postuleid.
Liikumine on kogu loomamaailma ühine omadus. Lõppkokkuvõttes on see võitlus elu eest. See sõltub liikumisomadustest – “sa süüakse või sind süüakse”, mis on loodusliku valiku seaduse olemus: tugevaim jääb ellu, tal on suur kiirus, osavus, vastupidavus, kiire reaktsioon, löögivõime. kestaga kaitstud sihtmärk jne on keerulised, kõikidel arenguetappidel korduvalt dubleeritud, liikumist kontrollivad ajustruktuurid, seetõttu on koordinatsioonimehhanismide täiustamise protsess nii pikk ja hoolikas ning seetõttu on lokaalne ajukahjustus trauma või haiguse, liikumise tõttu, kuigi see omandab patoloogilise iseloomu, ei kao täielikult. Loodus ei kaota selles protsessis ühtegi oma varasemat omandatust.
Inimliigutuste, sealhulgas liikumise kujunemine ontogeneesis kordus fülogenees (ontogenees - kreeka keelest ontos - olemine ja geneesis - päritolu. Bioloogias on ontogenees indi duaalse arengu protsess, fülogenees (kreeka keelest phylon - klann, hõim) , maailma organismide – liikide, klasside jne – ajalooline areng).
Fülogeneesis sai kontrolli, toimingute koordineerimise protsess alguse üherakulistest organismidest, kus signaal ohust või saagi lähedusest edastatakse kontaktteed pidi, milleks on kemotaksis (kreeka keelest Chemo - keemia ja tachis - seade) . Bioloogias on kemotaksis algloomade liikumine keemiliste stiimulite kontsentratsiooni muutuste mõjul. Ärritusreaktsioon on võimalik ainult ärritaja vahetus läheduses. Evolutsiooni järgmine etapp on mitmerakulised organismid. Mitmerakulise süsteemi funktsioonide koordineerimise mehhanism muutub keerulisemaks. Selles regulatsiooni arengustaadiumis sekreteerib iga rakk rakkudevahelisse ruumi oma elutähtsa tegevuse produktid, edastades enda kohta teavet kogu süsteemile. See on humoraalne kontrolliviis, struktuurselt ja funktsionaalselt diferentseeritum. Märkimisväärne evolutsiooni etapp oli elusobjektide piklike vormide ilmumine. Selle tunnuse ilmnemine oli evolutsiooni käik, kuna piklik kuju vähendab looma jaoks ohtu. Kuid see tekitab ka palju probleeme kontrolliga, kuna pea-pea-otsa taga asuvad kehaosad peavad olema kaitstud ja kuulekad, valmis täitma keerukamat motoorset ülesannet, st olema oma tegevuses paremini koordineeritud.... Selle plaani motoorsete ülesannete täitmiseks genereerib evolutsioon objekti tajumise kaugviisi - ilmub retseptori aparaat (ladina keelest retseptor - vastuvõtmine, retseptio - vastuvõtmine). Bioloogias on retseptorid tundlike närvikiudude või spetsiaalsete rakkude – silma võrkkesta, sisekõrva jne – otsad, mis muudavad väljastpoolt (eksterotseptorid) või keha sisekeskkonnast (interotseptorid) tajutava ärrituse närviliseks. erutus, mis edastatakse kesknärvisüsteemi. Teleretseptorid (kreeka keelest She - kaugel, kaugel) - retseptorid, mis võtavad vastu signaale kaugelt - see on nägemise, kuulmise jne mehhanism. Teleretseptorite ilmumist nähakse hüppe, revolutsioonina liigutuste arengus, kuna see on juba saagi või ohu ettenägemise oskus, valmistuge vastava motoorse ülesande täitmiseks - oma ohutuse tagamiseks või ohvri enda valdusesse võtmiseks. Ülesanne muutub keerulisemaks ja samal ajal muutuvad keerukamaks juhtimis- ja täidesaatvad aparaadid - ilmub juhtimiskeskuste fookus - aju, luu- ja lihaskonna süsteem paraneb. N.A. Bernstein kirjutab, et vöötlihase ilmumine fülogeneesis oli evolutsiooni mõistatus. Sellel looduse omandamisel olid nii positiivsed kui ka negatiivsed (juhtimise mõttes) tagajärjed. Positiivne oli jõuvõimekuse suurenemine, keeruliste motoorsete ülesannete lahendamise hõlbustamine, reageerimisreaktsioonide kiirus, kehahoiaku stabiilsus, vastupidavus pikaajalisel tööl.
Võimalikuks sai mitte ainult kehatüve liigutamine, vaid ka liikumine jäsemete abil - kõndimine, lendamine, ujumine jne. Negatiivne, kui nii võib öelda, oli vajadus muuta keerukamaks juhtimissüsteemid ja liigutuste teostav aparaat - lihaseline ja luusüsteemid. Lihase struktuur muutub dramaatiliselt. Lihast nimetatakse seetõttu vöötmeliseks, kuna see koosneb vahelduvatest, üksteisest eristuvatest struktuurielementidest, mis on mikroskoopiliselt nähtavad punaste ja valgete põiktriipudena.
Struktuur on tingitud funktsioonist. Lihas kontrolli seisukohalt töötab põhimõttel "kõik või mitte midagi". Nendes tingimustes on lahendatavale motoorsele ülesandele (tegelikult koordinatsioonile) piisava jõu doseerimine keeruline ja loodus annab lihasele kiulise struktuuri, võime kaasata töösse mitte kõiki kiude, vaid vajaliku arvu kiude. antud hetkel ning “amortisaatorid”, mis on sujuva liikumise tagavad sidekoe vahekihid (punaste vahel valged triibud). Sellise lihase toimimiseks on vaja jäika tugi- ja liikumissüsteemi - luustikku. Skelett ei täida mitte ainult mootorit, vaid ka kaitsefunktsiooni (kilpkonna kest, kolju, mis kaitseb aju õrna kude kahjustuste eest). Skelett peab olema sitke, aga samas väga liikuv, sõnakuulelik, sellised. on vaja liikuvaid ja istuvaid liigeseid, mille kuju vastab iga liigese funktsioonile ja vabadusastmete arvule.
Biomehaanika vabadusaste on võime liikuda kindlas suunas. Plokikujulise liigese puhul on võimalikud kaks vabadusastet (näiteks põlveliigese puhul on need paindumine ja sirutus).
Paralleelselt täiustatakse kontrollimehhanisme. Kesknärvisüsteem muutub järjest keerulisemaks, tekivad rohkem diferentseerunud ajustruktuurid. Aju juhtimisstruktuuride arenemisprotsess ei ole ebasüstemaatiline, mitte kaootiline, vaid järgib täiesti kindlaid seadusi. Hiiglaslikus, mitmemiljonilises ajurakkude maailmas on hierarhia üles ehitatud kindlas järjestuses ja selle kujunemise rangelt määratletud ajalistes piirides – madalamate ajustruktuuride allutamine kõrgematele. Hierarhia (kreeka keelest hieros - püha, ogsyo - võim) - terviku osade või elementide järjestamine kõrgeimast madalaimasse. Funktsioonide korraldamise teoorias on see juhtimispõhimõte.
Jätkame Bernsteini teooria teise positsiooni dešifreerimisega, nimelt liigutuste konstrueerimise tasandite mõistega onto- ja fülogeneesis. Juhi- ja tegevaparaadi mehhanismide täiustamist kirjeldati lühidalt varem. Liikumiste, eriti liikumiste biomehaaniliste ja neurofüsioloogiliste omaduste võrdluse põhjal järeldab Bernstein, et kõrgemate loomade ja inimeste diferentseeritud liikumised on madalama organisatsiooniga juhtimismehhanismide täiustamise tulemus.
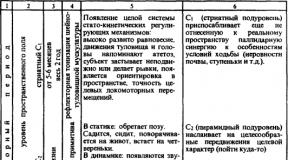
Tabel I
Liikumise reguleerimise filo- ja ontogenees (N.A. Bernsteini järgi)
süsteeme, luues struktuure, mida ta nimetas hoone liikumise tasanditeks.
Selle positsiooni dešifreerimiseks võtab ta kasutusele mõiste funktsioonide lokaliseerimine. Lokaliseerimine (lad. Lokus, lokalis - koht, lokaalne) on Bernsteini definitsiooni järgi ajustruktuuride kompleks, mis vastutab teatud klassi liigutuste sooritamise eest. Liikumiste klass on liigutused, mis on iseloomulikud loomale tema motoorse arengu teatud staadiumis. (Lisaks iseloomustatakse seda viimast mõistet laiemalt.) Ta rõhutab, et mõiste funktsiooni lokaliseerimine ei ole teema – aju topograafiline anatoomia (kreeka keelest topos – koht, grafo – kirjutan), vaid funktsioon ja morfoloogiline. Sellesse kontseptsiooni sisseehitatud sisu on raadiovastuvõtja paneelide plokkide funktsiooni ja paigutuse osas sarnane, kui terviku eraldi osad ei pruugi alati olla lähedal, samas kohas, nagu topograafiline anatoomia ette näeb. Veelgi enam, lokaliseerimise mõistes sisalduvate ajustruktuuride küpsemist saab aja jooksul pikendada, kui mõned elemendid on juba valmis oma funktsiooni täitma, teised aga kujunemisjärgus. Ilmselt võib see seletada teatud liigutuste õpetamise tohutut keerukust, kui ühe lokaliseerimise elemendi väljatöötamise viivitus muudab hetkel võimatuks teatud liigutuse esilekutsumise - olgu selleks siis klaverimäng, libisemine. uisud või iseteenindusoskused. Seetõttu on soovitav alustada sporditreeningutega või tantsukunsti ja pillimängu õppimisega teatud vanuses. See võib seletada tserebraalparalüüsi keerukust, tohutut ulatust, aga ka teatud mustrit kehahoiaku ja kõndimise patoloogias.
Teema ja lokaliseerimise mõistete erinevust illustreerib näide, kus teatud ajustruktuuride kahjustamise korral ei saa patsient kätt tõsta, kuid kui tal palutakse kork eemaldada, tõstab ta lihtsalt ja vabalt aju. sama käsi.
Eelneva põhjal pakub Bernstein välja skeemi liigutuste või koordinatsioonitasemete konstrueerimiseks filo- ja ontogeneesis.
Iga koordinatsioonitasand sisaldab aferentset süsteemi, keskust ja eferentset süsteemi. (Aferent - ladina keelest afferens - toomine, efferent - ladina keelest efferens - läbiviimine.) Bioloogias edastab see närviimpulsi vastavalt keskmesse või tsentrist tööorganisse.
Oleme kogunud tabelisse Bernsteini teabe hoone liikumise või koordinatsiooni mustri kohta (tabel I).
Diagrammil on iga koordinatsioonitaseme jaoks näidatud kesknärvisüsteemi morfoloogiline substraat, selle lõpliku moodustumise vanus, aferentne süsteem, selle koordinatsioonitaseme järgi korraldatud liigutuste klass ning kehahoiaku ja liikumise spetsiifilised elemendid. on näidatud selle tasemega kontrolli alla võetud isik.

Prelokomotoorse perioodi koordinatsioonitasemed: rubrospinaalne, talamo-pallidaarne. vöötpüramiidne, mis koosneb kahest alamtasandist - striataalne ja püramiidne.
Seejärel järgige liigutuste reguleerimise tasemeid, kui liikumine on juba välja kujunenud: parietaal-premotoorne (objektiivsete tegevuste ja semantiliste eesmärkide tase) ja grupp kõrgemaid ajukoore tasemeid, mis pakuvad kirjutamist, kõnet jne, mille katvus on ei sisaldu selle raamatu ülesandes.
Rubrospinaalne tase on kõige iidsem - paleokineetiline (kreeka keelest palaios - iidne, kinesis - liikumine) - liigutuste koordineerimise tase.
Selle nimi sisaldab aju punase tuuma (tuum - tuum, rubrum - punane) ja seljaaju tuumade ladinakeelset määratlust (ladina keelest spina - ridge, anatoomias - seljaaju - seljaaju).
Selle morfoloogiliseks substraadiks on vestibulaarse aparatuuri aferendid, naha, kõõluste, lihaste ja liigesekottide retseptorid, paarisjäsemete ja vahejäsemete ristreflekside retseptorid (ladina sõnast reflekxus - tagasi pööratud, peegeldunud, bioloogias - keha reaktsioon ärritusele retseptorite), siseorganite refleksid: vasomotoorne, kuseteede, roojamine.
See lõpetab oma arengu emakas. Selle koordinatsioonitaseme poolt pakutav liigutuste klass koosneb ujumist iseloomustavatest liigutustest - aeglastest või kiiretest, pidevast või äkiliselt liikumatuks muutuvatest liigutustest, millesse on kaasatud peaaegu 100% keha lihaskonnast. Nende iseloom meenutab kalade liikumist.
Talamo-pallidaarne tase on veel üks liigutuste reguleerimise mehhanism, mis on valmis toimima juba enne sündi. Selle nimi tuleneb ladinakeelsetest terminitest: talamus - visuaalne küngas, anatoomias - vahekere põhiosa, peamine subkortikaalne keskus, mis suunab igat tüüpi tundlikkusega impulsse - temperatuuri, valu jne - ajutüvele, subkortikaalsetesse sõlmedesse. ja ajukoor. Pallidum (ladina keelest globus pallidum - pallidum) reguleerib inimestel autonoomseid funktsioone. See tase tagab kõndimise peamise tohutu sünergia peaaegu 100% skeletilihaste rütmilise järjestusega. (Sünergia – kreekakeelsest sõnast sinergBs – koos toimimine. Bioloogias on sünergistid lihased, mis toimivad koos ühe kindla liigutuse sooritamiseks, näiteks sissehingamine, millesse on samaaegselt kaasatud roietevahelised, interkondraalsed ja diafragma lihased.)
Talamo-pallidaarne tase koos rubrospinaalse tasemega tagab gravitatsioonivastase tasakaalu mehhanismi ja teatud loote liikumise mustri emakaõõne amniootilises vedelikus.
Siinkohal tuleb märkida, et antropoloogiateostes (kreeka keelest antropos - inimene, logos - sõna, õpetus) on teavet selle kohta, et selgroolülide trabekulaarse struktuuri vanusedünaamika räägib loote selgroost kui toimivast organist.
Nende seisukohtade põhjal on uudishimulik Ameerika teadlaste avastus, kes tõestasid, et loode kuuleb juba 8–12 nädalat. Selle huvitava fakti tuvastaks järgmiselt: lapse isa, surudes pead ema kõhule, ümises sama meloodiat. Pärast sündi reageeris laps sellele meloodiale alati selgelt, rahunes ja lakkas nutmast.
Arstid teavad hästi, et loote põrutusliigutused toimuvad üsna teatud arenguperioodidel nii selgelt, et liikumisaeg on üks kriteeriume raseduse kestuse määramisel.
Võib oletada, et tüsistunud sünnitusega lapsel, kellel diagnoositakse ajuhalvatus, on juba iidseim liigutuste koordinatsioonimehhanism vigane. Sel juhul saavad selgeks paljud raseduse ja sünnituse kulgemise tunnused, näiteks loote hiline liikumine, tema vale asend (põiki jne) emakaõõnes, pea vale sisestamine sünnikanali läbimisel. , takerdumine nabanööri, mille üks ots kinnitub liikumatult emakaõõne seina külge (näiteks putka külge seotud, ketti keeratud väike kutsikas võib surra), kiire või vastupidi aeglane sünnitus , enneaegne või hiline sünnitus. Kõiki neid märke on tserebraalparalüüsiga laste ajaloos üsna sageli märgitud. Sellele ideele viitab ka tõsiasi, et tserebraalparalüüsi motoorsed häired liigitatakse kogu oma mitmekesisusega teatud rühmadesse, kus liigutuste muster on sama. Jah, ja raske on eeldada, et Venemaa, USA, India jne sünnitusarstid on sünnitusabis ühtviisi hooletud.
Nendest asenditest võib sünnivigastusi - käte perifeerseid halvatusi, rangluude murrud, hematoomid ja muud tüsistused käsitleda mitte põhjusena, vaid tagajärjena - loote liigutuste häiritud programmi tagajärjena. Sellest lähtuvalt oleks ilmselt vaja ultraheli või muude uurimismeetodite abil uurida loote liigutuste mustreid, nende mustrit ning riskimärkide leidmisel soovitada emaka sünnituse stimuleerimise asemel keisrilõiget, mis sellises olukorras suurendab ainult loote hüpoksiat.
Selle regulatsioonitaseme aferentseks süsteemiks jäävad vestibulaaraparaadi retseptorid, mis on loodud andma märku kehaosade asukohast ruumis (otoliitaparaat) ning liikumiskiirusest ja -suunast (sisekõrva poolringikujulised kanalid). Labürindisüsteem, punane tuum, nägemisnärvi tuberkul ja väikeaju tuumad moodustuvad tavaliselt sünnihetkel ja võivad täielikult toimida.
On põhjust oletada, et raseduse ja sünnitusega kaasnevad tüsistused võivad tuleneda rubrospinaalse ja talamopallidaarse liikumiskonstruktsiooni struktuurielementide defektidest, mis väljenduvad erineva raskusastmega ja põhjustavad edasist deformatsiooni patogeneesi kehaasendis ja kõndimises. lapsel, kellel on tserebraalparalüüs pärast sündi. Laps sünnib "thalamo-pallidaarsena" ja vastsündinu liigutused on tingitud sellest küpsest koordinatsioonitasemest. Liigutuste klass, mida reguleerib rubrospinaalse koordinatsiooni tase, kattub talamopallidaarse taseme liigutustega. Samal ajal ei kaota loodus oma varaseid koordinatsioonimehhanisme ja iga järgnev, rohkem diferentseeritud tase muudab liikumise omadusi nende komplikatsiooni suunas, paraneb vastavalt keerukamale motoorsele ülesandele, kasutades samal ajal otstarbekaid elemente. primitiivsem liikumisklass.
Niisiis, sujuvad, vahelduvad liikumatusega, rubrospinaalse taseme pidevad liikumised (sarnaselt athetoidse hüperkineesiga) lähevad autonoomsete funktsioonide piirkonda, nagu soole peristaltika, veresoonte seina kokkutõmbed, põie sulgurlihaste töö ja anus. Talamo-pallidaarse koordinatsioonitaseme kõnni sünergia, mis hõlmab peaaegu kõiki skeletilihaseid, on aluseks kahe jalaga kõnnaku korraldamisele, mitte madalamate loomade mitme jala ja kehatüve liikumisele (tabel I). Kõrgemate loomade ja inimeste evolutsioonis kasutab loodus ka selliseid primitiivseid tõrjemeetodeid, mis on omased üherakulistele organismidele. Näiteks võib tuua vererakkude liikumise veresoonte voodis. Uuringud on näidanud, et tegemist ei ole rakkude passiivse liikumisega vereplasma voolus, vaid vererakkude aktiivse reguleeritud liikumisega.
Diagrammi järgi kuulub globaalne painde sünergia talamo-pallidaarse taseme liigutuste klassi. Kliiniliselt näeb see välja järgmine: kui palute patsiendil üht jalga põlvest kõverdada, toimub mõlema jala puusa-, põlve- ja hüppeliigeses alati samaaegne automaatne painutamine (joon. 1 A, B). Isoleeritud liikumine pole võimalik. Põlvili langev patsient langeb ette või ei saa üldse põlvedel püstiasendit võtta, voldides nagu sulenoa, kuid suudab kõverdatud jalgadega istuvas asendis siiski hoida püsti.
Selle taseme raske defekti korral ei saa inimene iseseisvalt istuda, istuda, ei hoia istumisasendit.
Jälgides lapse liigutuste arengut, võib täheldada, et kuni teatud vanuseni terve laps ka seda ülesannet täita ei saa, kuid siis koos struktuuride küpsemisega ja sellele hierarhilist redelit järgiva striataalse tasemega tekib motoorne sünergia. tunduvad olevat lokaliseeritud, piiratud funktsioneerivate lihaste ja liigeste mahuga.ning seeläbi saavad võimalikuks diferentseeritumad ja eesmärgipärasemad asendid ja liigutused. Selline diferentseerimine on võimalik, nagu eespool mainitud, striataalse koordinatsioonitaseme küpsemisel, kui astmeline sünergia hakkab korreleeruma ruumi tunnustega - takistused, pinnase ebatasasused, astmed jne. Striatum - lat. korpus striatum - triibuline keha. Anatoomias - väga erinev


A. Patsient globaalse painde sünergiaga. Parema põlveliigese fleksiooni sooritamise katsega kaasneb sünergiline paindumine puusa- ja põlveliigeses, dorsaalfleksioon puusa- ja põlveliiges, jalalaba dorsaalfleksioon ja nimmepiirkonna lordoosi sügavuse suurenemine. Isoleeritud liikumine pole võimalik. B. Vasaku jala paindelihaste EMG. Parema (kontralateraalse) põlveliigese paindumise katsega kaasneb vasaku jala painutajalihaste kõrge elektriline aktiivsus.
muutis aju moodustumise, mängides pallidumi jämeda refleksi aktiivsuse regulaatori ja pidurdaja rolli. Teatavasti alles kõndima hakkav laps “ei tunne kõrgust”, ei astu üle takistuste jne.
Globaalne laiaulatuslik motoorne sünergia asendub lokaliseeritud sünergiaga. See protsess lõpeb tavaliselt 2 aasta pärast. Sellise motoorse sünergia lokaliseerimise tunnuseks on Strumpeli nn sääreluu sünkineesia, mida ta kirjeldas 1920. aastatel. Ta pidas seda neuroloogiliseks sümptomiks, mis on püramiidraja kahjustuse eristav märk. Liikumisregulatsiooni püramiidne tase on Bernsteini järgi striataalse tasandi kõrval, ehk Sttrumpeli andmed kinnitavad kaudselt liikumiskonstruktsiooni tasandite klassifikatsiooni paikapidavust.
Strumpeli sääreluu sünkineesi tõlgendatakse kliiniliselt kui jala automaatset dorsaalfleksiooni ja supinatsiooni koos esimese varba samaaegse plantaarse fleksiooniga. Kõndimise elektromüograafilise ja biomehaanilise struktuuri analüüs võimaldab kinnitada, et see sünkinees (Kreeka päikesest - koos, kinema, kinematos - liikumine) on terve inimese liikumiselement ja selle eesmärk on kanda jalg üle toe. See muutub selgelt märgatavaks ainult ekstreemsetes olukordades: kõrgel kõndimistempol, äkiliste takistuste ületamisel.
Püramiidi koordinatsioonitaseme ebapiisava kontrolliga muutub sääreluu sünkineesia, mis ei ole piiratud eelnevalt näidatud liigutuste amplituudiga ja nende avaldumisajaga sobivas vahemikus, patoloogiliseks ja määrab sellised kehahoiaku ja kõndimise tunnused tserebraalparalüüsi korral nagu pahkluu. ebastabiilsus. liiges sagitaaltasandis, tagumise impulsi märkimisväärne nõrgenemine kõndimisel, nn kolmikpainde poos seismisel.
Püramiiditasand lõpetab koordinatsiooni arengu eelmotoorse perioodi. See tasand paneb liikuma selle semantilise tähenduse (sinna minna, tuua seda ja teist jne). Märk selle taseme kujunemisest liikumises on võime sooritada isoleeritud liigutust.
Kui püramiidne koordinatsioonitase on ebapiisav, nagu eespool mainitud, on see raske või täiesti võimatu, näiteks jala dorsaalfleksioon. Kui palutakse teha ainult seda liigutust, toimub selle isoleeritud paindumine minimaalses mahus ja käskluse "painutage põlve" korral painutatakse jalg automaatselt, mõnikord kuni jala tagaosa puudutab sääre pinda. Sarnast olukorda täheldatakse ka elektromüograafilises uuringus, kus jalalaba automaatse painutamise ajal sääreluu sünkineesia korral on maksimaalne EMG amplituud kaks korda suurem kui maksimaalne EMG amplituud, kui üritatakse teha jala isoleeritud dorsaalfleksiooni (joonis 2 A). , B, C).
Püramidaalne koordinatsioonitase küpseb kaheaastaselt ja selle küpsemise lõppedes moodustub liikuvus täielikult


Riis. 2 (A, B, C) – Strumpeli sääreluu sünkineesiga patsient.
A. Vasaku jala vabatahtlik isoleeritud dorsaalfleksioon on minimaalne (10 ° piires). B. Vasaku jala põlve kõverdamise katsega kaasneb selle jala jalalaba automaatne dorsaalfleksioon. B. Sääreluu eesmise lihase EMG, kui üritatakse tekitada jalalaba maksimaalset dorsaalfleksiooni (ülemine kõver). Sääreluu eesmise EMG - lihase amplituud on märkimisväärselt suurenenud, kui proovite painutada sama jala põlve (alumine kõver).


mina. Järelikult annab liikumiste konstrueerimise skeem meile ettekujutuse liikumise etapiviisilise organiseerimise protsessist ja iga taseme jaoks on võimalik määrata diferentsiaaltunnus. Seega on talamo-pallidaarse tasandi puhul tegemist globaalse painde sünergiaga, striataalse tasandi puhul sääreluu Strumpeli sünkineesiga ja püramiidi tasandi puhul jala vabatahtlik isoleeritud dorsaalfleksioon. Ka pärast nende tasemete lõplikku väljakujunemist ei jäätu liikumine oma arengus, selle elementides toimuvad muutused, mis on põhjustatud noorukieas või lagunemisest tingitud hormonaalsetest häiretest, vanemas eas koordinatsioonimehhanismide halvenemisest, samuti traumast või haigusest põhjustatud ajukahjustustest. Selles mõttes võib tserebraalparalüüsi korral kehahoiaku ja kõndimise patoloogiat tõlgendada algselt defektsete ajustruktuuride arengu tulemusena, mis vastutavad koordinatsiooni eest liikumise ontogeneesi igas etapis.
Bernsteini järgmine postulaat on refleksrõnga printsiip ehk siis tagasiside ehk nn sensoorsed korrektsioonid (sensoorne – ladina keelest sensus – taju, tunne, tunnetus). Need formulatsioonid määratlevad sama mõiste.
Bernstein oli esimene, kes tutvustas neurofüsioloogias refleksirõnga kontseptsiooni kui tagasiside vormi, olles astunud enda jaoks dramaatilise diskussiooni suure Pavloviga, kes rajas oma organiseerimise ja funktsiooni parandamise teooria reflekskaare kontseptsioonile. , välistades seega tagasiside.
Liikumine esindab Bernsteini järgi kahte interaktsioonitsüklit: perifeerset ja tsentraalset (joonis 3).
Perifeerne motoorne aparaat teostab oma tegevust keeruka interaktsiooni kaudu väliskeskkonnaga. Lihaspinge mõõt oleneb nii lihase innervatsiooniseisundist kui ka liigesenurga väärtusest, s.t. lülide süsteemi poolt hõivatud hetkeasendist. Sellest järeldub, et lihaspinge on üks liikumise põhjusi, kuna see on jõud, mis rakendatakse lülile ja sunnib seda oma asendit muutma. Seevastu lülide liikumine, millega kaasneb liigeste nurkade muutumine, muudab lihaste kinnituspunktide vahelist kaugust ja põhjustab seeläbi muutuse selle pinges. Siin on füsioloogiale iseloomulik interaktsiooni tsükliline vorm: lihaspinged mõjutavad liikumise kulgu ja liigutused lihaspingeid. Sellised tsüklilised vastasmõjud on mehaanikas hästi tuntud ja neid väljendatakse matemaatilises keeles. Tsükliliste interaktsioonide perifeerse süsteemi kohal on üles ehitatud teine, mille tegevus on samuti tsükliline.
See on kesknärvisüsteem koos kõigi oma paljude aparaatidega. Siin on taecTO interaktsioonid erinevas järjekorras. Esiteks paneb juhtseadmest tulev esmane efektorimpulss, mis suunatakse kesknärvisüsteemist läbi eesmiste sarvede rakkude lihassüsteemi, viimase liikuma või muudab selle liikumise olekut. Seda liikumist või liikumise muutust tajuvad närviaknad.

kõõlused, lihased ja liigesekapslid, mis kuuluvad propriotseptiivsesse närviaparaadisse. Nad edastavad afektoriteede kaudu teavet liikumise muutuste kohta. Võttes arvesse seda impulssi, aga ka visuaalset ja kuulmisvõimet, saadab kesknärvisüsteem uue impulsi, kohandades algset motoorset impulssi, see tähendab, et interaktsioonid on tsüklilised, mis viitab refleksi rõnga olemasolule. tagasiside või sensoorne korrektsioon.
Passiivne motoorne aparaat koosneb liikuvatest luulülidest, mis moodustavad kinemaatilisi ahelaid, mida iseloomustavad liikumisvabadusastmed.
Üleminek ühelt vabadusastmelt kahele või enamale tähistab valikuvajaduse tekkimist. Vajalikuks muutub automaatne, pidev, otstarbekas valik.
Kinemaatiline ahel muutub juhitavaks ainult siis, kui see suudab määrata igale ahela elemendile kindlad, soovitavad teed ja panna need elemendid mööda määratud rada liikuma.
"Liikuva organi liigsete vabadusastmete ületamine, st selle muutmine kontrollitavaks süsteemiks, on liigutuste koordineerimise ülesanne." Bernstein nimetab koordinatsiooni põhimõtet sensoorsete korrektsioonide põhimõtteks.
Eelnev selgitab täielikult, miks kesknärvisüsteemi efektoraparaadi häired reeglina ei too kaasa puhtaid koordinatsioonihäireid, tekitades ainult halvatuse, pareesi, kontraktuuride jne sündroome, ja miks aferentsete süsteemide talitlushäired põhjustavad tingimata ataktikat. tüüpi liikumishäired, st koordinatsioonihäired.
Kõik kliinikus tuntud orgaaniliste koordinatsioonihäirete vormid on alati seotud retseptoraparaadi ja nende liikumisteede haigustega: vestibulaaraparaat (labürindi- või vestibulaarne ataksia), propriotseptiivseid ja taktiilseid impulsse juhtivad seljaaju tagumised sambad (tabeetiline ataksia), vastastikused süsteemid. väikeaju (väikeataksia) ...
Inimestel on võimalik kompensatsioon, mis võib ühel või teisel määral orgaanilisest ataksiast üle saada. Neid teostatakse alati uut tüüpi tundlikkuse (visuaal-, kuulmis- jne) kaasamisega motoorsesse protsessi.
Sensoorsete korrektsioonide läbiviimisel osalevad erinevatel juhtudel ja erineval määral kõik keha aferentatsioonitüübid.
Kasutades Sherringtoni terminoloogiat, nimetab Bernstein kogu seda tüüpi retseptori funktsioonide komplekti "propriotseptikooniks" laiemas funktsionaalses tähenduses.
See on sensoorsete näpunäidete süsteem asendite, liigendusnurkade, kiiruste, lihaste venituste ja pingete jaoks. Lihas, mis põhjustab oma tegevusega muutusi kinemaatilise ahela liikumises, ärritab proprioretseptorite tundlikke lõppu ja need signaalid, sulgudes KNS-is efektorradadele, muudavad efektori voolu (st tekib refleks ring). Koordinatsioon selles arusaamas ei ole mingisugune efektorimpulsside täpsus või peensus, vaid füsioloogiliste mehhanismide erirühm, mis loob pideva organiseeritud tsüklilise interaktsiooni afektor- ja efektorprotsesside vahel.
Kuna iga tõelist tähendust omav liigutus ületab oma teel sisemised ja välised jõud, peitub selle kogu olemus otstarbekas võitluses nendega.
Motoorne ülesanne ja jõud, mida selle lahendamiseks tuleb ületada, on välismaailma dikteeritud ega allu indiviidile.
Motoorse probleemi õigeks lahendamiseks on vaja kogu motoorset tegevust algusest lõpuni kontrollida meelte abil, jälgida ja kontrollida iga hetke: kas probleemi lahendamine läheb nii nagu peab , ja iga hetk vajalike paranduste tegemiseks. Nende liikumiskorrektsioonide mehhanism on sensoorne korrektsioon. Liikumiseks kõige vajalikuma ühe või teise tundlikkuse tüübi defekt ja nende poolt pakutavad sensoorsed korrektsioonid põhjustavad motoorika koordinatsiooni tõsiseid häireid.
Liikumist ei saa läbi viia ainult ühe sisemise ergutuste ja pärssimise tasakaalu seaduse järgi, sest esimesest hetkest peale hakkavad seda häirima kehale eelnevalt teadmata ja tema kontrolli alt väljas välised jõud ning vastastikuste kokkupõrgete jõud. ja tagasilöök pikkades ja liikuvates jäsemete kettides ning vastupidavus väliskeskkonnale ...
Keha tundlike aferentsete süsteemide roll ja tegevus algab alles hetkest, kui nad annavad käivitava signaali järgmiseks liigutuseks. Niipea, kui see algas, ilmuvad vastuseks tõhusatele esimestele impulssidele kõigis liikumisaparaadi tundlikes seadmetes (eelkõige lihas-liigese tundlikkuse organites) aferentsed impulsid, mis annavad märku, kuidas liikumine algas ja kuidas see kulges. Need testitavad sensoorsed signaalid määravad kindlaks järgmised vajalikud sensoorsed korrektsioonid ajus.
Sellest lähtuvalt on semantilise motoorse akti rakendamisel närviprotsessi põhivorm Bernsteini järgi refleksrõnga vorm.
Motoorse ülesande täitmisel täidavad tundlikud süsteemid kahte erinevat funktsiooni: signaali-käivitusteenus ja teenus, mis kontrollib liikumise mõju ja tagab selle juhitavuse.
Integraalsete semantiliste motoorsete tegude juhtimise uurimus esitas keha aferentseid süsteeme hoopis teises valguses. Motoorse toimingu koordinatsioonistruktuuri ja selle patoloogia häirete analüüs, liikumiste kontrollimise uurimine ringprotsessis, näiteks "refleksrõngas", näitas, et aferentsed süsteemid annavad ajule märku liikumise käigust ja annavad aluse sensoorsed korrektsioonid, mitte “toored sensoorsed signaalid, mis on üksteisest kvaliteedi alusel isoleeritud (eraldi kombatavad, kinesteetilised, visuaalsed jne) ja vastupidi. Nendel tajudel, mis tagavad liikumist kontrolli, on alati terviklike komplekssete sünteeside iseloom, mis on sügavalt läbi töötatud erinevate aistingute ajukomplekside poolt, mida kinnitavad arvukad mällu salvestatud varasemate aistingute jäljed, muljed varasematest liikumistest ruumis. "Mida keerulisem on motoorne ülesanne, seda keerulisem ja primaarsetest tooretest aistingutest kaugemal on seda taset teenindav sensoorne (sensoorne) süntees, seda rohkem toimub aju sisemine töötlemine, mõistmine, järjestamine ja isegi selles üldistatud esmaste aistingute skematiseerimine." .
Kogu sensoorsete sünteeside järjekindel evolutsiooniline komplikatsioon ja rikastamine kulges üksikute meeleorganite moonutuste ja ebatäpsuste kõrvaldamise, nende näitude kontrollimise ja arusaamise tagamise suunas.
Kõik järjestikku moodustunud liigutuste ülesehituse tasandid (nagu neid tähistab ka moodne motoorsete tegude füsioloogia) on väga erineva evolutsioonilise vanusega, nad on säilinud inimestes, moodustades terve vastastikuse alluvuse hierarhilise redeli ja kõrgeima. neist kuuluvad eranditult inimestele (kõne ja kirjutamise tase) ... Kõige iidsemad madalamad tasemed, mis on moodustatud loomadel oma ajusubstraatide ja neile teostatavate motoorsete ülesannete loendiga, on säilinud inimestel ja kontrollivad jätkuvalt kõige iidsemaid, semantiliselt primitiivsemaid motoorseid toiminguid (neelamine, ujumine, kõndimine jne).
"Uue individuaalse motoorsete oskuste kujunemise alguses viib peaaegu kõik korrektsioonid asendusena läbi juhtiv tase - initsiaator, kuid peagi muutub positsioon, sooritatud keeruka liigutuse iga tehniline aspekt ja üksikasjad, varem või hiljem leiab madalamate tasandite hulgast selle, kelle aferentatsioonid on selle detailiga kõige adekvaatsemad, pidades silmas selle pakutavate sensoorsete korrektsioonide omadusi. Järk-järgult moodustub järjestikuste lülitite ja hüpete tulemusena keerukas mitmetasandiline struktuur, mille eesotsas on juhtiv tasand, mis on adekvaatne motoorse toimingu semantilisele struktuurile ja realiseerib ainult kõige elementaarsemaid parandusi, mis on määrava tähtsusega. tähenduse termineid. "Tema dirigeerimisel on liigutuste sooritamisel kaasatud mitmed taustatasandid, mis teenindavad liikumise tausta või tehnilisi komponente, toonust, innervatsiooni ja denervatsiooni, vastastikust pärssimist, keerulisi sünergiaid jne." (N.A. Bernstein).
Liikumisjuhtimise tehniliste komponentide ümberlülitamist madalamatele, taustatasemetele, nimetatakse tavaliselt liikumisautomaatikaks.
Igas liikumises, olenemata selle taseme kõrgusest, realiseeritakse ainult üks juhttase.
Vahel pikka aega ja visalt treenimist nõudva automatiseerimisprotsessi olemus seisneb just kesknärvisüsteemi ülalkirjeldatud taustade jaotusplaani väljatöötamises, liikumise motoorse koostise määramises.
Motoorse koostise määramist nimetavad neuroloogid mõnikord "liikumisprojekti koostamiseks".
Esialgu kasutab laps stabiilse sammupikkuse säilitamiseks propriotseptiivseid mehhanisme ja teeb "post factum" korrektsiooni, seejärel siseneb täiuslikum "ante factum" korrektsioonitehnika (vastavalt lat. Post ja ante - pärast ja enne fakti) .
Esialgsete korrektsioonide fenomen toimib kõigil juhtudel hilisema ja täiuslikuma koordinatsioonivormina võrreldes sekundaarsete paranduste mehhanismiga.
Liikumise omandamise alguses pingutab algaja kõiki antagonisti lihaseid, eelnevalt ja varuga keelab kõik vabadusastmed, jättes ühe või kaks antud baasi jaoks kõige vajalikumat liigutust.
Harjutuse järgmises etapis, olles selle juba omandanud, millal ja mis suunas järgmine reaktiivjõu impulss selleni jõuab, laseb katsealune endale järk-järgult, üksteise järel vabastada sel määral fikseeritud vabadusastmed, et reaktiivjõudude vältimiseks, mis annab järsu energiasäästu, st võitleb reaktiivjõudude vastu. Liikumise arengu kolmandas etapis on võitlus reaktiivjõududega teistsuguse iseloomuga, kui need muudetakse takistustest kasulikeks jõududeks.
Sensoorsed korrektsioonid on stiimuliks nii liigutuste arengus kui ka nende edasise paranemise protsessis vanuselises aspektis. Veelgi enam, Bernstein määratleb liikumise organiseerimise protsessi oma klassis evolutsioonilisena ja üleminekut uuele liikumisklassile, mis on põhjustatud diferentseerituma koordinatsioonitaseme tekkimisest, revolutsioonilise, spasmilisena. Kõrgema regulatsioonitasemega liigutused ilmnevad madalama organiseeritud klassi sees, saavutavad maksimaalse arengu ning varasemate liigutuste märgid, mis on uue motoorse ülesande seisukohalt irratsionaalsed, nihkuvad välja.
Näiteks globaalse painde sünergia motoorsed automatismid asenduvad järk-järgult sääreluu sünkineesi lokaliseeritud automatismidega. Samal ajal muutuvad kõndimise biomehaanilised ja elektrofüsioloogilised omadused, mis võimaldavad sooritada keerukamaid motoorseid ülesandeid, nagu sammu tugiperioodi faaside eristamine, pinnase ebatasasuse ületamise võime, a. kõrgem kõndimise tempo jne.
Lõppkokkuvõttes lahendavad need probleemid sensoorsed korrektsioonid. Lõppude lõpuks juhitakse juhtivat lihasaparaati, kogu lihaste tööd seljaaju eesmiste sarvede rakkudest tulevate impulsside abil, vastavalt põhimõttele: impulss - lihaste kontraktsioon. Kogu koordinatsiooni "lahtivõtmine" (millise jõuga lihaseid kokku tõmmata, millal, kui kaua jne) toimub supraspinaalsel tasemel - Bernsteini näidatud koordinatsioonitasemetel, see tähendab eesmiste sarvede rakkudes. selgroog. Seega on neuroloogilise terminoloogia kohaselt "lõplik tee" kogu suprasegmentaalse kesknärvisüsteemi aparatuuri mitmekesisuse ja keerukuse jaoks sama.
Seetõttu kujunevad kehahoiak ja kõndimisomadused suprasegmentaalsetel tasanditel ja sensoorsed korrektsioonid on selle protsessi vahendiks.
See põhimõte on väga oluline selles mõttes, et tserebraalparalüüsi ehk tsentraalse halvatuse korral tundub kohatu rääkida lihasjõu kadumisest kui liigese liikumisulatuse piiramise põhjusest (see on iseloomulik ainult perifeersele halvatus, kus see katkeb või lõplik - eferentne - tee on kahjustatud), kuid me peaksime rääkima liigutuste koordinatsiooni rikkumisest - koordinatsioonihäired, düskineesia (kreeka dys ... ja ladina dis ... - eesliide mis tähendab raskust, rikkumist, millegi kaotamist). Nendest positsioonidest lähtudes on loogiline kaaluda tserebraalparalüüsi ortopeedilise kehahoiaku ja kõndimise korrigeerimise meetodite olemust.
Kõikide ortopeedia kasutatavate vahendite eesmärk on lõppkokkuvõttes mõjutada sensoorsete korrektsioonide olemust, olgu selleks siis sensoorsete impulsside voolu vähenemine liigese fikseerimisel lahase või ortopeedilise aparaadiga või külma kasutamine impulsside voolu suurendamiseks. Viimane saavutatakse näiteks Michel la Mathieu meetodil, kui randmeliigese ja sõrmeliigeste fleksioonkontraktuuriga põhjustab arsti poolt tekitatud edasine üsna tugev ja pikaajaline paindumine, mis intensiivistab aferentset voolu, sirutajakõõluse liigutuste maht. Sama rolli mängib nn ravi-koormusülikond – kosmonaudi ülikond, mis on mõeldud kasutamiseks tserebraalparalüüsi korral. Pikisuunaliste elastsete varraste abil, liikudes õlavöötmest vöökohani ja vööst jalgadeni, tugevdatakse sensoorseid impulsse aju koordinatsioonistruktuuridele, mis vastutavad antigravitatsiooniliste funktsioonide reguleerimise eest. Tõepoolest, kostüümi kasutamisel täheldasime tserebraalparalüüsiga laste kehahoiaku ja kõndimise stabiilsuse olulist tõusu. Kuigi tuleb märkida, et antud juhul ei saa välistada ebasobivaid biomehaanilisi kompensatsioone kehahoiaku stabiilsuse tõstmiseks, nagu lülisamba kõveruse sügavuse muutus, suurenenud imitatsioonisünkineesi vms.
Kirurgiline sekkumine mõjutab oluliselt ka sensoorsete impulsside voolu: müo- ja tenotoomia (kreeka keelest mfs - lihas, tome - segment, tendo - ladina keelest - kõõlus; meditsiinis - lihaste ja kõõluste dissektsioon), artrodees (kreeka keelest arthron - liiges, de - ladina keelest ja des - prantsuse keelest - puudumine) välistavad liikumised liigestes ja praktiliselt peatavad propriotseptiivsete impulsside voolu. See seletab tserebraalparalüüsi operatsioonide spasmolüütilist toimet, mis ulatub sekkumisalast palju kaugemale. Mõnikord normaliseerib sirglihase sündroomi korral üks reieluu sirglihase dissektsioon kogu kehahoiaku.
Lihaste siirdamine muudab ka aferentset voolu, kaasates seeläbi sensoorsete korrektsioonide mehhanismi. See säte sunnib meid kirurgiliste operatsioonide näidustustele vanuse osas rangemalt lähenema. Näiteks globaalne sünergia muudab mis tahes operatsiooni mõju raskesti ennustatavaks, nagu ka equinuse kombinatsioon sääreluu sünkineesiga.
Soodsaim tulemus on tserebraalparalüüsiga patsientidel, kellel on püramiidse regulatsiooni puudulikkus, st kui prelocotoorse periood on oma kujunemise põhimõtteliselt lõpetanud ja tserebraalparalüüsiga "talamo-pallidaarsete patsientide" tulemust ei ole praktiliselt võimalik ennustada, alates perioodist. liikumise kujunemine on just alanud.
Nendest ja teistest tüsistustest tuleb täpsemalt juttu peatükis, mis käsitleb kehahoiaku ja kõndimise kirurgilise korrigeerimise põhimõtteid ajuhalvatuse korral.
Sensoorsed korrektsioonid on aluseks mitte ainult liikumiste korraldamisele ontogeneesis, vaid ka nende parandamise mehhanismiks, mida tõendab nii spordi-, töö- kui ka liikumiskorralduse oskuste treenimise teooria. N.A. Bernstein tõstab oma teoorias esile liikumisakti peamised struktuurikomponendid: tugi- ja ülekandeperioodide vaheldumine, topelttoe periood.
Tegevuse ja vastutegevuse võrdsuse põhimõtte kohaselt on jalgade pingutused võrdsed ja vastupidised toetusreaktsioonide pingutustele ehk tugipinna jõumõjudele kõndiva inimese kehale. See on astme vertikaalne komponent (vt IV peatükk).
Pikisuunaline komponent on kõige informatiivsem.
Jõuimpulsid, mis määravad jala liikumise kõndimisel, ei piirdu sugugi ühe paari lihtsate vastastikuste impulssidega iga topeltsammu kohta.
Laste jooksmise arengut uurides selgus, et tavaliselt algab 2–5-aastastel lastel üleminekuperioodi korraldus ja suurimad uuendused ilmnevad jala proksimaalsetes punktides, distaalsed aga püsivad stabiilsena. pikka aega.
2-5 aasta vanuselt näitavad reie pikisuunalised kõverused kõndimisaja jooksukorrektsiooni juba täies mahus, samas kui jalalaba kõverused ei ole veel võrdlusperioodil kõndimisest eristunud.
See domineeriv evolutsiooniline kulg ülalt alla proksimaalsetest punktidest distaalsetesse punktidesse viib N.A. Bernsteini järgmise füsioloogilise üldistuse juurde. (Kuna see info on ortopeedile, eriti aga tserebraalparalüüsi korral kehahoiakut ja kõndimist korrigeerivale kirurgile ülimalt oluline, tundub kohane tsiteerida kogu autori teksti.) proksimaalsed lihased. Teine asi on palju tõenäolisem. Jala proksimaalsed punktid (näiteks puusaliiges) on ümbritsetud palju võimsama lihasmassiiviga kui distaalsed (jalg) ja samal ajal esimestele osadele lähimate lülide inertsimomendid. lülide inertsimomendid on kahtlemata väiksemad kui distaalsete lülide inertsimomendid. Seetõttu on puusarühma lihastel palju lihtsam nihutada reie ülemisi segmente oma kohalt kui jalalabal, mille nihutamiseks peavad nad liigutama kogu inertse jala ülalt alla. See on seotud ka asjaoluga, et distaalsete linkide (suhtelised) kiirused on reeglina suuremad kui proksimaalsed. Järelikult on ka esimeste kineetilised energiad suuremad ja neid on raskem ületada. Distaalsed lülid mängivad rolli kogu jala suhtes, meenutades raske pendli rolli.
Sellest järeldub, et närvilisel efektorimpulsil on oma tugevust arvestades võrreldamatult lihtsam libiseda proksimaalsesse kõverasse ja peegelduda selles märgatava dünaamilise laine kujul, kui läbi murda kogu inertsiaalse takistuse paksusest. distaalsest süsteemist. Viimases tunda andmiseks peab efektorimpulss omama märkimisväärset jõudu või jõudma “õigel ajal” – sellisel hetkel, mil distaalne süsteem on selle tajumiseks eriti soodsates tingimustes.
Milles see soodne moment väljenduda saab, on veel raske öelda ja siin avaneb ilmselt suur uurimispõld: võib-olla on lihtsalt jäseme soodne asend, mis tagab lihastele suurima biomehaanilise toimeefektiivsuse. , võib-olla on see soodne hetk pöördepunkti kiirus, mil inertsiaalsed takistused on kõige nõrgemini tajutavad, võib-olla lõpuks on see lihasaparaadi eriti vastuvõtliku häälestuse hetk, mis tekib siin või teisest propriotseptiivsete signaalide ühinemisest.
Nii või teisiti, distaalsete lülide juhtimine nõuab suuremat osavust, kõrgemat koordinatsioonitehnikat selles mõttes, et võime parandada õiget, optimaalset hetke, anda just õigel ajal just õige impulss. Kui see aeg kasvõi murdosa sekundist vahele jääb, siis impulss enam ei "läbi", ehk ei anna perifeeriale mingit märgatavat mõju.
Tuleb märkida, et me ei räägi distaalsete segmentide väikestest koordineeritud liigutustest nagu sõrmede liigutused, vaid jäseme distaalsete segmentide globaalsetest, ulatuslikest ekstrapüramidaalsetest nihketest. Nende viimaste dünaamika sõltub lõppkokkuvõttes samadest puusalihastest nagu jala proksimaalsete punktide dünaamika.
Distaalne dünaamika ei tükeldata aga rikkalikult biodünaamilisteks detailideks mitte siis, kui need detailid ilmuvad efektori impulsis ja hakkavad peegelduma ühilduvate proksimaalsete punktide dünaamikas, vaid alles siis, kui efektori ja retseptori funktsionaalne häälestus on kindlaks tehtud ja kui efektor ns õpib jäädvustama funktsionaalse juhtivuse üürikesi hetki. Dünaamilise tükeldamisega kaasneb eriti suur jõuküllus distaalsetes lülides, mis annab tunnistust välise, biomehaanilise korra dünaamika väga peenest juhtimisest.
Keerulises mitmelülilises pendlis, mis biomehaanilises mõttes on jalg, on lülide dünaamiline vastasmõju, reaktiivjõudude mäng, keerulised võnkeahelad jne väga mitmekesised ja rikkalikud. Ja asjaolu, et koolitatud meister ei varja neid, vaid peegeldub sellises külluses dünaamilistes kõverates, räägib neuro-motoorse aparaadi väga peenest reaktiivsest kohanemisvõimest propriotseptiivse signaaliülekandega.
Distaalsete jõukõverate suurem lõhenemise aste on märk võimest tabada väikseima takistuse hetki, teisisõnu kasutada täielikult ära kogu välise rikkalik jõudude mäng ja võib-olla ka kogu füsioloogiline (tahtmatu) ulatus. vastastikused ja muud, keerukamad reaktiivsed protsessid lihaste perifeerias.
See kliiniku jaoks suhteliselt raske materjal on tsiteeritud selleks, et rõhutada, et kirurgiline ekstremism ajuhalvatusega laste jalaliigeste liigutusi kontrollivate lihaste siirdamise ja pikendamise küsimustes on vaevalt õigustatud enne, kui kõndimisstereotüüp on lõpuks paika pandud. moodustatud. Tuleb märkida, et tserebraalparalüüsiga lapse motoorne areng jääb peaaegu alati maha 2 - 3 aasta võrra.Kui võtta arvesse Bernsteini infot, siis tavaliselt küpsevad kõndimine ja jooksmine 5 aastaks.
Lisaks märgib autor kõndimise kolme involutsioonietapi olemasolu vanuselises aspektis.
1. Kõndimise struktuursete mehhanismide funktsioonide vähenemine, kuid suurem kontroll teadvuse üle.
2. Valvas teadvus asendub askeldusega, väikeste sammude liigutustega.
3. Motoorsete struktuuride eksplitsiitne lagunemine.
Märgitakse varem ühtse koordineerimise lõhenemist.
Seega on ontogeneetiline materjal kindlalt näidanud, et kõndimise dünaamiline struktuur tekib, läbib mitmeid korrapäraseid arengustaadiumeid ja involutsioone vanemas eas sama loomulikult.
Põhimõtteliselt on siin kõige olulisem see, et see areng on seotud väga selgete kvalitatiivsete muutustega kõndimise struktuuris.
Morfoloogia poolest läbib see struktuur varajases ontogeneesis:
a) vastastikuse innervatsiooni algstaadium;
b) morfoloogiliste elementide järkjärgulise arengu staadium;
c) nende elementide ülemäärase leviku staadium;
d) infantiilsete elementide vastupidise arengu etapp ning tervikliku ja proportsionaalse vormi lõplik korraldus.
“Mis puudutab motoorset koordinatsiooni, siis kõnnaku biodünaamiline struktuur läbib ka mitmeid kvalitatiivselt erinevaid arenguetappe: alguses on sümptom propriotseptiivse koordinatsiooni alatalitlusest üldiselt, millele järgneb post factum propriotseptiivse koordinatsiooni arenemise staadium. (kompenseeriv või teisene koordineerimine).
Ante factum koordineerimine (annustamine või esmane koordineerimine), mis korraldatakse palju hiljem, areneb palju harvemini.
Niisiis annab Bernsteini liigutuste konstrueerimise teooria ettekujutuse liikumise neurofüsioloogilisest ja biomehaanilisest struktuurist selle kujunemise ja täiustamise protsessis. See sisaldab põhisätteid:
1. Inimliigutuste ontogeneesia kordab fülogeneesi, mis võimaldab rääkida autori pakutud liigutuste konstrueerimise skeemi universaalsusest ja seega ka nende seaduste kohaldamise legitiimusest inimese motoorsete sfääri erinevate häirete, sealhulgas ajuhalvatuse korral. .
2. Koordinatsioonitase on morfoloogiliselt rangelt märgistatud ja hõlmab teatud aju struktuure, aferentseid ja efferentseid retseptorsüsteeme, mis on võimelised reguleerima kindlaid liikumisklasse.
3. Liikumiste omadused ei ole päritavad, vaid omandatud. Liikumiskvaliteedi parandamine on protsess, mis koosneb ajustruktuuride küpsemise etappidest, mis koordineerivad teatud sellele tasemele omaseid liigutusklasse. Sellel protsessil on astmeline iseloom. Bernstein nimetab aju koordinatsioonistruktuuride kompleksi ja sellele omase liigutuste klassi kogumit liigutuste konstruktsiooni tasandiks. Iga liigutusklassi jaoks oleme määratlenud tunnuse – sellele liigutusklassile omase indikaatori.
Talamo-pallidaarse tasandi puhul on see globaalse painde sünergia, striataalse tasandi jaoks sääreluu Strumpeli sünkinees, püramiidi tasemel võime teostada vabatahtlikku isoleeritud jala dorsaalfleksiooni, sõrmede isoleeritud liigutamist.
4. Ontogeneetilises arengus kasutab loodus kõiki varem omandatud koordinatsioonimehhanisme, alates primitiivsetest, inimeses taimestiku sfääri suunduvatest kuni SUURTE sotsiaalsete tegudeni. Igast liigutuste klassist kasutab loodus ontogeneesis elemente, mis sobivad motoorse ülesande täitmiseks, pärssides liigutusi, mida uue keerukama koordineeriva ülesande jaoks pole vaja. Seda funktsiooni täidab järgmine, paremini organiseeritud koordinatsioonitasand.
5. Koordinatsiooni aluseks on sensoorse korrektsiooni mehhanism, kaks interaktsioonitsüklit ja oskuste arendamise mehhanism.
6. Liigutuste kvalitatiivsete omaduste võrdlev analüüs nende ontogeneesi protsessis normaaltingimustes ning kehahoiaku ja kõndimishäirete kliiniliste sümptomite kompleksid ajuhalvatuse korral võimaldab tõmmata selgeid paralleele. Sellest lähtuvalt on alust arvata, et tserebraalparalüüs ei ole jääkstaadiumiga haigus, vaid algselt defektse aju küpsemise tagajärg, mis avaldub juba emakas. Teatud klassi liigutuste sarnasus ja tserebraalparalüüsi liikumishäirete sümptomatoloogia võimaldab klassifitseerida tserebraalparalüüsi kehahoiaku ja kõndimise patoloogiat puuduliku koordinatsioonitaseme järgi, võttes samas arvesse selle skeemi piisavat konventsionaalsust.
7. Laps sünnib tavaliselt thalamo-pallidaarsena. Esimese kahe aasta jooksul läbib see koordineerimismehhanismide arengu eelmotoorse perioodi veel kaks etappi - vööt ja püramiid. Tserebraalparalüüsiga lastel ei saavuta püramiidi tase oma täit küpsust. Mida hilisemalt ja defektsemalt motoorsete funktsioonide koordineerimise eest vastutavate ajustruktuuride küpsemine konkreetsel patsiendil toimub, seda keerulisem on ravi tulemust ennustada ja seda ettevaatlikumalt tuleks ilmselt läheneda radikaalse ravi määramisele. , eriti kirurgilised, ravimeetodid.
8., Prelokomotoorne periood lõpetab oma arengu 2 aasta võrra normis. See tähendab, et kõik stabiilse püstiasendi ja kõndimise säilitamiseks vajalikud elemendid on paigas. Sellegipoolest juhib Bernstein tähelepanu sellele, et sellised liikumiskoostisosad nagu tugifaasid, jooksuelemendid viivad oma arengu lõpule 3. eluaastaks ja kõik normaalse liikumise komponendid 5. eluaastaks. Tserebraalparalüüsiga lapsed on motoorsete oskuste arengus oluliselt maha jäänud - 2 ja 3 aasta võrra. Sellega seoses tuleb märkida, et alla 6–7-aastaste laste kirurgilise sekkumise prognoos on keeruline ja tulemus ei kattu alati soovitud tulemusega.
Olulise panuse motoorsete oskuste kujunemise mõistmisse õppeprotsessis andis N.A. teoreetiline uurimus. Bernstein. Ta tõestas: motoorsete tegevuste mõjul muutub keha tugevamaks, vastupidavamaks, väledamaks, osavamaks. Seda keha omadust nimetati treeninguks. Liikumisharjutuste kordused on vajalikud selleks, et püstitatud liikumisülesanne ikka ja jälle, iga kord edukamalt lahendada ning seeläbi selle lahendamiseks parimaid viise otsida. Selle ülesande korduvad lahendused on vajalikud ka seetõttu, et looduslikes tingimustes ei ole välised asjaolud täpselt samad, nagu ka motoorsete probleemide lahendamise käik ei kordu kaks korda järjest samal viisil. Mis tahes liigutuste kordamine vastavalt N.A. Bernstein, "on kordus ilma kordamiseta." Laps peab omandama kogemusi talle ja tema väliskeskkonnale määratud mitmekülgselt muudetud motoorses ülesandes ning ennekõike nende muljete kogu mitmekesisuses, mille abil selle liigutuse sensoorseid parandusi tehakse. See on vajalik selleks, et kohaneda isegi kerge ja ootamatu olukorra või motoorse ülesande enda muutusega.
Närvisüsteem mängib motoorsete oskuste arendamisel olulist rolli. Motoorse oskuse arendamiseks vajab aju üsna pikka treeningut.
Lapse liikumisvabadusastmete tohutu ülemäära tõttu ei suuda ükski lihastele suunatud motoorne impulss, ükskõik kui täpsed need ka pole, iseenesest tagada õiget liikumist vastavalt tema soovile. Liikumise sooritamise tingimuste muutmine on võimalik ainult sensoorse korrektsioonimehhanismi aktiveerimisel. Kõigi uuritava liigutuse aluseks olevate aistingute kogemiseks ja sensoorse korrektsiooni aluse ettevalmistamiseks on vajalik motoorse tegevuse korduv kordamine.
Oskuste arendamine on semantiline aheltoiming, mille käigus ei saa vahele jätta ühtegi lüli. Motoorse oskuse kujunemine on närvisüsteemi kontrolli all ja seda esindab mitmetasandiline motoorne juhtimissüsteem. Mis tahes motoorset tegevust saab üles ehitada ainult tänu ajutasemete rangele hierarhiale. Kokku on viis taset: "A", "B", "C", "D", "E". Igal tasandil on oma meeleelundite (efferentide) teenindav brigaad.
Tase üks-"A": "Oled heas vormis"... Tase "A" on kõige esimene ja madalaim. Iga taseme aktiivsus on seotud teatud närvisüsteemi osadega. Tase "A" - see on osa seljaajust, väikeaju madalaimad osad ja kõik seal asuvad närvikeskused - tuumad. Tase "A" reguleerib lihaste toonust (neid varustavate lihaste ja närvide valmisolekut vastu võtta ja tõhusalt täita keskusest tulevat käsklust-impulssi), mis on oluline keha toe kujunemiseks. Sellel tasemel viiakse läbi värisevate liigutuste tahtmatud toimingud - värisemine külmast või temperatuuri tõusust; närviline värisemine erutusest või võpatus äkilisest teravast helist, valgusvihust jne.
Tase "A" juhib mõnede vabatahtlike toimingute ülesehitust: vibratsiooni-rütmilised toimingud (näiteks ventileerimine); teatud kehahoiaku võtmine ja hoidmine, sealhulgas lapse kehahoiak. Ilusa kehahoiakuga - pea tõstetud, keha sirgu, liigutused vabad. Plastilise lihastoonuse reguleerimine, mida teostab "A" tase, sõltub suuresti emakakaela toonilisest refleksist (pea ja kaela asend).
Tase kaks-"V": liikumine – tempel. See on sõbralike liigutuste ja standardsete klišeede tase. Ta on väga oluline, kuna ta juhib nelja jäseme propelleriga varustatud liikumismehhanismi. Anatoomiliselt tagavad taseme "B" suurimad subkortikaalsed tuumad. See tase töötleb ja saadab ajju teavet liigeste nurkade suuruse, liigeste liikumiskiiruse, kehatüve jäsemete lihastele ja sügavatele kudedele avaldatava surve jõu ja suuna kohta.
Tase "B" tagab täpse liikumise taasesituse. Rütmiline, õõtsuv liigutus, näiteks käe liikumine kõndimisel, kordab täpselt eelmist, mille tulemusena tembeldatakse justkui samad toimingud. Seetõttu nimetatakse taset "B" stantside tasemeks, nii et täpselt sellel tasemel liigutusi korratakse.
Tase "B" määratleb kolm olulist omadust, mis on vajalikud ehituse liikumiseks:
1) kümnete liikumist teostavate lihaste töösse kaasamine;
2) oskus juhtida liikumist harmooniliselt ja sujuvalt õigeaegselt;
3) eelmisest järgnemine - võime jälitada liigutuste kordamist mitte ainult ajaliselt, vaid ka tegevuse mustri järgi.
Inimene peab liigutusi "välja viskama", vastasel juhul jõuaks kogu tohutu lihaste tegevus kaootilisse, kontrollitud olekusse. Liikumisklišeed on vajalikud ka seetõttu, et need viiakse läbi ilma teadvuse osaluseta, vabastades seeläbi ajusüsteemid mitmesugusteks tegevusteks.
Tase "B" juhib iseseisvalt mõnda tegevust, mis pole seotud ümbritseva ruumiga. Ta saab peamiselt teavet oma keha toimingute kohta: see on tahtmatu venitusliigutus pärast und, emotsioonide motoorsed ilmingud, sealhulgas grimassid näol (näoilme, mõned keha, käte, õlgade liigutused saab kindlaks teha lapse emotsionaalne seisund), paindub, paindub keha, lainetavad rütmilised liigutused, sealhulgas mõned tantsulised.
Kuna tase "B" ei ole seotud vestibulaarsüsteemiga (tasakaaluorganitega, väikeajuga) ning tal on nõrgad ühendused nägemis- ja haistmismeelega, võtab see kergesti üle kogu keeruka liigutuse sisemise, "jämeda" väljatöötamise. , viiakse läbi inimkeha sügavustes. Ta viib läbi kõndimise, jooksmise sisemise koordinatsiooni ettevalmistamist, vormistades kõik selle sõbralike liigutuste komplekti toimingud: ta valmistab ette kõnnimustri, mis on käte ja jalgade liikumise alus, ilma milleta mis tahes tasapinnal liikumine - sile või ebaühtlane - on võimatu. Kuid seda tehakse abstraktsel kujul, väljaspool konkreetset seadet, kuigi meie kõndimine toimub kuskil, mingil pinnal, mööda mõnest takistusest, mööda ebatasasusi, samme, pöördeid jne. sellegipoolest ei ole need asjaolud tasemel "B" kättesaadavad. Nad surevad kõndides ja ületavad järgmise taseme - taseme "C".
Kolmas tase-"C": inimene ja ruum... See tase N.A. Bernstein nimetas ruumivälja tasandit ja pidas seda liikumiste ülesehitamisel üheks vastutusrikkamaks. Erinevalt eelmistest tasemetest on tasemel "C" mitmeid olulisi eristavaid tunnuseid.
Esiteks on see seotud välismaailmaga. Lähim suhe temaga on "C" taseme kõige olulisem omadus.
Teiseks, teleretseptorid ja ennekõike nägemine, mis lõpmatult laieneb ja tõstab kehasse siseneva info mahtu ja kvaliteeti, töötavad juba tasemel "C".
Ruumivälja kolmas tunnus on selle liikumatus. Tänu kvalitatiivselt töödeldud teabele, mis peegeldab varasemaid kogemusi (ja beebi omandab selle juba hällis), tajub laps teda ümbritseva maailma liikumatust. Tase "C" juhendamisel sooritatavad liigutused ei sisalda korduse ega vaheldumise elemente.
Ruumivälja teine oluline omadus on selle meetrilisus ja geomeetrilisus. Esemete kauguste, suuruste ja kuju hoolikas hindamine määrab lapse selliste toimingute kõige olulisema kvaliteedi nagu täpsus, täpsus, ilma milleta poleks tema ebatäpne tegevus eesmärgini jõudnud.
Tänu nendele omadustele juhib "C" tase inimkeha eriti olulisi liigutusi. Need liigutused "viivad alati kuskilt, kuskilt ja mingil põhjusel". Nad “kandvad, suruvad, tõmbavad, võtavad, rebivad, viskavad. Neil on algus ja lõpp, rünnak ja saavutus, hoop ja vise. selle tasandi liikumised on translokatiivse iseloomuga ja kohanduvad tingimata ruumiga, milles nad kulgevad. See kvaliteet on selle taseme liikumiste jaoks üks olulisemaid, mistõttu seda nimetatakse "ruumiliseks".
PEAL. Bernstein märgib, et eelmine tase "B" (asub allpool) konstrueerib kõndimist - kõige keerulisemat motoorset tegevust, milles osalevad kümned lihased ja liigesed. Aga see jalutuskäik jääbki abstraktseks, justkui "näituse" mudeliks, millega saab tutvuda ja isegi imetleda. Kuid kõndimine muutub otstarbekaks tegevuseks alles pärast seda, kui tase "C" on kaasatud selle rakendamisse. Siis “arvestab” maapinnal kõndiv jalg ja kohandub kõigi tee ebatasasuste ja raskustega, määrab optimaalse sammupikkuse ja liigutuste sageduse, mis on jalakäijale kõige ökonoomsem. Kui see kõnnib trepist üles, astub jalg astme täpile või keskele ning sammu pikkus kohandub täpselt kahe astme vahelisele kaugusele. Kui sammud osutuvad ebaühtlasteks, lõhenenud, siis jalg "püüab" neist ebakorrapärasustest mööda minna või nendega kohaneda, kahjustades kõndivat inimest kõige vähem.
Taset "C" iseloomustab võime tegevusi muuta ilma liikumise täpsust kahjustamata. Sel juhul on lõpptulemus tingimata saavutatud. Seda taset iseloomustab ka motoorsete komponentide varieeruvus ja vahetatavus ning ühelt elundilt teisele liikumise ümberlülitus (seega, olles õppinud parema käega kirjutama, kannab laps vajadusel selle oskuse üle vasakule). käsi).
Samas võivad lülituda ka liigutuste võtted ise: laps saab kõndida, joosta, roomata, hüpata ühel või kahel jalal riietatud eseme juurde.
Tase "C" omab veel ühte väga olulist omadust: võime muuta liigutusi, st. lapse uute viiside ja võimaluste otsimine tundmatute tegude elluviimisel. See on asendamatu õppeprotsessis, uue motoorsete oskuste, uue oskuse loomise protsessis.
Milliseid iseseisvaid liigutusi tehakse C-tasemel? Nende arv on nii suur, et neid on võimatu loetleda. PEAL. Bernstein toob neist välja ainult peamised rühmad; liigutused:
1) liikumine, kogu keha liigutamine ruumis - kõndimine, jooksmine, ronimine, roomamine, ujumine, köiel kõndimine, suusatamine, uisutamine, jalgrattasõit, sõudmine, üleshüppamine, pikk, sügav, trikitamine;
2) kogu keha "mittekomotoorsed" liigutused ruumis - erinevad harjutused võimlemisaparaadil, akrobaatika;
3) liigutused - ruumiga manipuleerimine - üksikute kehaosade, kõige sagedamini käte liigutused: žestidele viitavad puudutused;
4) asjade liigutamine ruumis - liikuvast esemest haaramine, püüdmine, nihutamine, kandmine, kokkukerimine, raskuste tõstmine jne;
5) kõik ballistilised liigutused – viskamine, tennise ja linnake mängimine;
6) sihivad liigutused - väravavahi seadistus-ootusliigutused jalgpallis ja hokis;
7) imiteerivad ja kopeerivad liigutused - visandamine, objekti või tegevuse kujutamine žestidega, s.o. pildiline pantomiim.
Tase "C" mängib olulist rolli spordis, akrobaatilistes liigutustes. Sellel on vähe tööjõu liikumisi, mis nõuavad tegevuste jaotust. Töötoimingud viiakse läbi kõrgematel "D" ja "E" tasemetel. Seega on tase "C" lüli tegevuste, liigutuste ja ruumi vahel, kus laps elab ja tegutseb.
Neljas tase-"D": reguleerib tegevusi, mis on inimestele ainulaadsed. Neid toiminguid pakub ajupoolkerade piirkond.
Taseme "D" keerukus on nii suur ja teadmised selle kohta nii väikesed, et siiani pole võimalik kõiki taseme funktsioone välja selgitada. D-taseme liigutuste tegemisel on peamine asi objektiga toimuva tegevuse semantiline pool.
Meeleelundid (nägemine, puudutus jne) võtavad vastu ja edastavad ajju kogu informatsiooni objekti kohta ning aitavad kindlaks teha, mida täpselt ja millises järjestuses selle objektiga teha saab ja peaks tegema. On oluline, et tase "D" hindaks mitte selle suurust, kaalu, värvi, vaid selle topoloogiat - kvalitatiivset skeemi; õppeaine üksikute osade suhe.
Topoloogia põhimõte ei kehti mitte ainult objektide endi, vaid ka "D" tasemel tehtavate toimingute kohta. Nende rakendamine toimub ühe skeemi järgi (eemaldage, siduge jne, kuigi nende toimingute rakendamine hõlmab paljusid viise). Vihasem; oluline pole mitte ainult toimingu iga elemendi järjekord, vaid ka eraldi toimingule kuluv aeg. Saadud ahelprotsess annab sisuka tegevuse, näiteks: mantli selga panemine ja nööpimine, suuskade määrimine; salv jne.
See on D-tase, mis ei paku mitte ainult objekti liikumist, vaid selle semantilist kasutamist, et muuta ümbritsevat reaalsust, viia see võimalikult lähedale lapse vaimselt loodud "soovitava tuleviku" mudelile. enne iga toimingu algust.
Kõigi selle taseme toimingute eripäraks on nende kõrge automatism, st. neid sooritatakse ilma teadvuse aktiivse kontrollita, mis on muidugi võimalik vaid korduvate harjutuste ja treeningute järel.
Selle taseme teine oluline tunnus on seotud parema ja vasaku käe tegevuse erinevusega. Kõigil juba loetletud haavadel, tasemetel oli see erinevus peaaegu märkamatu. Nii kõndides kui ka mistahes esemest haarates toimivad mõlemad käed ühtemoodi ja vasak käsi asendab hõlpsalt paremat.
Ja alles semantiliste toimingute tasemel ("D") saab see erinevus määravaks: täht kirjutatakse parema käega, parema käega tõmmatakse lusikas suhu. Vasaku käega töötamiseks on võimalik ümber õppida, aga see on väga-väga raske ja kindlasti mitte kiire (vasakukäelise puhul on vastupidi).
Loetleme nüüd nii kõrge tasemega määratletud peamised tegevusrühmad:
Esimene rühm ühendab liigutused väikese arvu automaatsete toimingutega: objekti tunnetamine, võrdlemine ja valimine, lapse mis tahes tähendusrikkad tegevused;
Teine rühm sisaldab toiminguid, mida oluliselt toetab tase "C", ruumis toimuvaid semantilisi toiminguid; toimingud, mis hõlmavad taset "B"; osavad käteharjutused;
Kolmas rühm ühendab kõigi eelmiste rühmade tegevust, ennekõike seda kirjutamist ja kõnet - huulte ja keele liikumist.
Lõpuks avaldub "D" taseme ülekaal liikumisel massaaži ja isemassaaži ajal. Seega pole selliseid sisukaid tegusid, mida "D" tasand ei suunaks.
Viies tase-"E", asetseb eelmisest veelgi kõrgemal, loob motoorse teo motiivi ja viib läbi selle peamise semantilise paranduse. Lõpuks viib ta liikumise tulemuse kavatsusega kooskõlla just selle mudeliga, mille laps enne tegevuse alustamist vaimselt lõi. See tase juhib lisaks kõnele ja kirjutamisele ka kõige rikkalikumat koreograafiliste, improvisatsiooniliste ja muude improvisatsiooniliste tegevuste arsenali, mille uurimine ja kirjeldus pole veel täielikult avalikustatud, kuid kujutab endast põnevat uurimisvaldkonda. Liikumiste reguleerimise mitmetasandilise süsteemi mõistmine võimaldab mitte ainult kujundada, vaid ka korrigeerida motoorseid oskusi, tuvastada aju häireid ja haigusi, mis viib lapse tervise parandamise kõige olulisema ülesande lahendamiseni.
Liikumisjuhtimist on aga harva esindatud ühelgi tasemel. Kõige sagedamini on motoorses tegevuses 3-4 taset.
Lõppkokkuvõttes saab hoonete liikumistasemete teooria esitada järgmiselt:
· Tase "A" – madalaim ja fülogeneetiliselt väga oluline;
· "B" - sünergia tase (tarbetud liigutused). See töötleb lihas-artikulaarsete retseptorite signaale, mis annavad teavet kehaosade suhtelise asukoha ja liikumise kohta. Ta osaleb kõrgema taseme liigutuste korraldamises: näoilmed, venitused, rütm jne;
· "C" – ruumivälja tase. Ta vastutab liikuvate liigutuste eest: kõndimine, jooksmine, ronimine jne;
· "D" – objektiivsete tegevuste tase. See on ajukoore tasand, mis vastutab objektidega toimingute korraldamise eest; olles monopoolne inimtasand, peegeldab see nii palju liikumist kui tegevust;
· "E" - intellektuaalsete motoorsete toimingute tase.
Iga lapse liigutus on ainulaadne. See toob endaga kaasa uute ja uute potentsiaalsete motoorsete võimete realiseerimise, peegeldades samal ajal nende kohanemisreaktsioonide uut taset. „Oskuste arendamise dialektika on just see, et kus on areng, seal on seega iga järgmine sooritus parem kui eelmine ehk ei korda seda...".
Siit ka küsimuse praktiline sõnastus: "Kuidas õpetada lastele õiget liikumist, kui korduvate harjutuste meetod on siin vastuvõetamatu?" Sellele küsimusele leiame vastuse N.A. Bernstein, kes uskus, et oskuste valdamise olemus ei ole "liigutuse kordamine ja mitte löömine", vaid liigutuste ülesehitamise mitmetasandilise süsteemi täiustamine. "Õige sooritatud harjutus kordab ikka ja jälle mitte antud motoorse probleemi lahendamiseks kasutatud vahendeid, vaid selle probleemi lahendamise protsessi, vahendeid aeg-ajalt muutes ja täiustades."
Paindliku oskuse kujunemist mõjutavad oluliselt laste loomulikud tingimused selle rakendamiseks igapäevatoimingutes, motoorse tegevuse organiseeritud vormides. Samal ajal pole liikumise täitmise tingimused kunagi samad, nagu ka motoorsete ülesannete lahendamise protsess ise. Ka lapse funktsionaalne, neuropsüühiline seisund on igal liigutushetkel erinev.
Motoorsete oskuste kujunemine on dünaamilise stereotüübi loomise protsess esimese ja teise signaalimissüsteemi koostoimes teise signaalnärvisüsteemi domineeriva väärtusega.
Lapse motoorsete oskuste arendamine on väga oluline. Need annavad talle võimaluse sooritada liigutusi väikseima energiakuluga ja suurima efektiga, tagavad tema motoorsete võimete ratsionaalse kasutamise.
1. lehekülg
Olulise panuse motoorsete oskuste kujunemise mõistmisse õppeprotsessis andis N.A. teoreetiline uurimus. Bernstein. Ta tõestas: motoorsete tegevuste mõjul muutub keha tugevamaks, vastupidavamaks, väledamaks, osavamaks. Seda keha omadust nimetati treeninguks. Liikumisharjutuste kordused on vajalikud selleks, et püstitatud liikumisülesanne ikka ja jälle, iga kord edukamalt lahendada ning seeläbi selle lahendamiseks parimaid viise otsida. Selle ülesande korduv lahendamine on vajalik ka seetõttu, et looduslikes tingimustes ei ole välised asjaolud täpselt samad, nagu ka motoorsete probleemide lahendamise käik ei kordu kaks korda järjest samal viisil. Mis tahes liigutuste kordamine vastavalt N.A. Bernstein, "on kordus ilma kordamiseta." Laps peab omandama kogemusi talle ja tema väliskeskkonnale määratud erinevalt muudetud motoorses ülesandes ning ennekõike nende muljete kogu mitmekesisuses, mille abil selle liigutuse sensoorseid parandusi tehakse. See on vajalik selleks, et kohaneda isegi kerge ja ootamatu olukorra või motoorse ülesande enda muutusega.
Närvisüsteem mängib motoorsete oskuste arendamisel olulist rolli. Motoorse oskuse arendamiseks vajab aju üsna pikka treeningut.
Lapse liikumisvabadusastmete tohutu ülemäära tõttu ei suuda ükski lihastele suunatud motoorne impulss, ükskõik kui täpsed need ka pole, iseenesest tagada õiget liikumist vastavalt tema soovile. Liikumise sooritamise tingimuste muutmine on võimalik ainult sensoorse korrektsioonimehhanismi aktiveerimisel. Kõigi uuritava liigutuse aluseks olevate aistingute kogemiseks ja sensoorse korrektsiooni aluse ettevalmistamiseks on vajalik motoorse tegevuse korduv kordamine.
Oskuste arendamine on semantiline aheltoiming, mille käigus ei saa vahele jätta ühtegi lüli. Motoorse oskuse kujunemine on närvisüsteemi kontrolli all ja seda esindab mitmetasandiline motoorne juhtimissüsteem. Mis tahes motoorset tegevust saab üles ehitada ainult tänu ajutasemete rangele hierarhiale. Kokku on viis taset: "A", "B", "C", "D", "E". Igal tasandil on oma meeleelundite (efferentide) teenindav brigaad.
Esimene tase – "A": "Oled heas vormis"
Tase "A" on kõige esimene ja madalaim. Iga taseme aktiivsus on seotud teatud närvisüsteemi osadega. Tase "A" - see on osa seljaajust, väikeaju madalaimad osad ja kõik seal asuvad närvikeskused - tuumad. Tase "A" reguleerib lihaste toonust (neid varustavate lihaste ja närvide valmisolekut vastu võtta ja tõhusalt täita keskusest käsku-impulssi), mis on oluline keha toe kujunemiseks. Sellel tasemel viiakse läbi värisevate liigutuste tahtmatud toimingud - värisemine külmast või temperatuuri tõusust; närviline värisemine erutusest või võpatus äkilisest teravast helist, valgusvihust jne.
Tase "A" juhib mõnede vabatahtlike toimingute ülesehitust: vibratsiooni-rütmilised toimingud (näiteks ventileerimine); teatud kehahoiaku võtmine ja hoidmine, sealhulgas lapse kehahoiak. Ilusa kehahoiakuga - pea tõstetud, keha sirgu, liigutused vabad. Plastilise lihastoonuse reguleerimine, mida teostab "A" tase, sõltub suuresti emakakaela toonilisest refleksist (pea ja kaela asend).
Tase kaks – "B":
liikumine – tempel. See on sõbralike liigutuste ja standardsete klišeede tase. Ta on väga oluline, kuna ta juhib nelja jäseme propelleriga varustatud liikumismehhanismi. Anatoomiliselt tagavad taseme "B" suurimad subkortikaalsed tuumad. See tase töötleb ja saadab ajju teavet liigeste nurkade suuruse, liigeste liikumiskiiruse, kehatüve jäsemete lihastele ja sügavatele kudedele avaldatava surve jõu ja suuna kohta.
Tase "B" tagab täpse liikumise taasesituse. Rütmiline, õõtsuv liigutus, näiteks käe liikumine kõndimisel, kordab täpselt eelmist, mille tulemusena tembeldatakse justkui samad toimingud. Seetõttu nimetatakse taset "B" stantside tasemeks, nii et täpselt sellel tasemel liigutusi korratakse.
Loe ka...