Laaduritekskavaatorite klassifikatsioon ja nende rakendamine. Üks-line universaalse ekskavaatorite indeksi indeksi jaoks üheinimesekskavaatori klassifikatsiooni üldine seade
Üürile anda renditehnika?
Olete siin: Avaleht → Raamatukogu → Väljaanded
Ekskavaatorite tüübid: Lõpmatu sort
Earthmakers on üks kõige aeganõudevamaid ja alati vajalikumat. Masinad varustatud spetsiaalse töökeha kaevamise - kopad ja mõeldud kaevamiseks ja liikumise mulla ja / või mineraalaineid on tuntud sügava antiikajaga; Nad olid kujundanud Archimedes. Romaanid kutsusid neid ekskavaatorid ekskavaatorist, tehke õõnsust, süvendamist.
Suur Leonardo ajal ei olnud ekskavaatori geniaalne arusaam - nende kasutamine kindlustamise ajal ja Veneetsia kanalite kliiringu ja süvendamise ajal oli tavaline. Seejärel aktiveerisid ekskavaatorid inimese või keha loomade võimuga. Idas tõi ekskavaatori idee Marco Polo, mille eest ta teenis erilist kasuks viienda Mongoolia suure Kagani kasuks ja samal ajal Hiina dünastia Yuan Khungila esimene keiser.
Esimene ekskavaator mehaanilise - auru mootoriga tegi Ameerika insener James Otis (James Otis) 1843. Otis oli otsene järeltulija ühe "isa rahvast", ka James Otis, kes nimetas põhimõtet: "On olemas põhimõte Esinduseta maksud ei ole ", mille alusel alustas sõda Ameerika Ühendriikide iseseisvuse eest.
Ekskavaatori Otis oli 15 HP maht, andis tootlikkuse 40-50 kuupmeetrit. M tunnis (mis on väga ja üsna hästi sellise võimu ja kaasaegsete ideede puhul) ja asendati 50 kogenud tugevat ekskavaatorit. Üks esimesi ekskavaatorid jäid üsna kahjustatud olekusse ja pani muuseumi.
Esimesed auruskasulaatorid leidsid kohe taotluse sajandi ehitusplatside rakenduse: Suez kanal ja Nikolaev raudtee Venemaal. Kuid valitsuse töövõtjad ei meeldinud nendega: kindlus töötajad ja edusammud on odavamad. Kõik 4 autot 1848 müüdi Uurali Demidovi, kus nad kohe näitas kõrge efektiivsuse üleöö töö. See on välimus Otis ekskavaatorid Urals andis tõuke arengu raske inseneri seal.
Ekskavaatorid nendel päevadel
Nüüd on ekskavaator kõige tavalisem, enamiku müüdud ja erivarustuse vorm. Seal on ekskavaatorid, et neli täiskasvanud meest saavad oma kätega taluda ja ekskavaatorid moodustavad kõige ambitsioonikamate maatükkide parimad kolm. Muide, laialt levinud arvamus on see, et suurimad ekskavaatorid käivad valesti. Kõik kolm mehaanilist titaani: Bagger 288, Bucyrus-Erie 1850-V Big Brutus "ja Marion 6360" Kapten "- Roomik iseliikuvad masinad ja kaks viimast ühe armastavat. "Canten" on juba pensionile jäänud, kuid veel elus - Arkansase riigi tehnilises muuseumis ja "Bagger" Bruttiga töötavad. Kõige valguse neist tõmbab 12 tuhat tonni.
Ekskavaatorid täidavad mitmesuguseid töö erinevaid tingimusi. Igasugused ekskavaatorid ei ole tõenäoliselt tuntud isegi kogenud mehaanikuinsenerile. Kas olete kuulnud spetsiaalseid ekskavaatorid ülemise viljakuse mullakihi eemaldamiseks? Umbes maa-alused ekskavaatorid? Umbes veealuse põhjaga ekskavaatorid? Kõik sellised töötavad.
Sellegipoolest on absoluutselt valitsev vägev tüüpi, kuulekas ja kasulik "kaevandus" universaalsed ehitus ekskavaatorid, üheliiniga, mille hüdrauliline draiv, mis laguneb noolega, jälgitava või pneumokooli projektsiooniga. Need on seotud peamiselt sõna "ekskavaatoriga".
Universaalsed ekskavaatorid tarnitakse kõige sagedamini buldooseri prügilaga ja seejärel moodustavad ekskavaatori-buldooser. Sageli saab dumpi asemel ülekoormuskont riputada kahvlile, mis liigub vertikaaltasapinnal. Siis selgub ekskavaatori laadur. Seal on ka spetsiaalsed ekskavaatorid-laadurid, kes ei ole muud asja, kuidas järve ees ja selja taga.
Ekskavaatorite klassifikatsioon
Kirjeldada igasuguseid ekskavaatorid ja "lagunevad riiulitel" oleks sama Linnai. Ekskavaatorid jagatakse erinevate kriteeriumide liike ja tuleb märkida, et iga konkreetse masin on mitmetes neist olemas.
Sihtkoha järgi
- Universaalne - juba kirjeldatud.
- Ekskavaatorid-laadurid - koos kallutamise kopp-kastiga (on kirjeldatud eespool), mille ämber-kühveldaja tervikuna ja kokkuklapitava põhjaga, haarajaga, konveieriga ja punkri dosaatoriga. Ekskavaatorid-laadurid erinevad muudest, kuna see valatakse pinnase massi- või mahuosaga, mis ei ületa ekspordivahendi kandevõimet.
- Karjäär - eemaldatud ja kaevandamine.
- Spetsiaalsed - raudtee, Marsh, päästmiseks, ekskavaatorid-hävitajad, maa all, veealused jne jms.
Liikuvuse järgi
- Iseliikuvad - võib objekti objektist iseseisvalt liikuda.
- Kõigeväeline - võib liikuda end tööpiirkonnas.
- Piiratud iseliikuvad - võib näiteks liikuda spetsiaalselt ette nähtud teedel. raudteeruelidel.
- Täis-pöörde.
- Opt-kurjategijad.
Šassii tüübi järgi

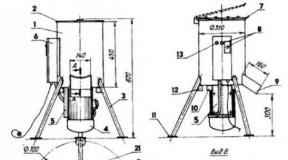
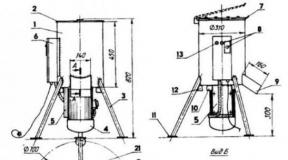
Märkus 1: ERLIFT - Seade pehme ja lahtise pinnase tõstmiseks suurte sügavusest. Õhk on puhutud toru lähedal alumise otsa lähedal, mullid tõmbavad vett ja saadud sublicas tõmbab pinnase. Sügavam Erlift, seda tõhusam. ERLINIFTS töösügavusega 6 km on välja töötatud, et arendada raua mangaani betooni hoiused Vaikse ookeani. Toru ei ole katki, toetage ujukite vööd.
Töötaja sõitmisel
- Mehaaniline - peaaegu varem.
- Hüdrauliline - kõige levinum.
- Diislikütuse elektriline - raske ja eriti raske autonoomne.
- Electric - Super Heavy Powered toiteallikas.
Töötsükli kohta
- Pidev tegevus - pöörleva multi-tõstetud, ketta või silindrilise (ees) veskiga hammastatud ahelaga (kraav).
- Tsükliline toime (üksik).
Ühe rea tsükliliste ekskavaatorite klassifikatsioon
Ühemõõtmega ekskavaatorid on kõige levinumad, kõige enam universaalsed ja kõige mitmekesisemad. Nad, nii rääkida kuningriigi kuningriiki. Seetõttu on nende klassifikatsioon erilise vestluse objektiks.
Rühma arvu järgi
- 0 - Eriti lihtne: kuni 3 tonni, 10-40 hj, ämber kuni 0,1 kuupmeetrit.
- 1 - Light-1: 5-6 t, 30-50 hj, 0,15-0,4 kuupmeetrit.
- 2 - Light-2: 8-9 t, 40-60 hj, 0,25-06 kuupmeetrit.
- 3 - keskmine-1: 10-12 t, 50-80 hj, 0,3-1,0 kuupmeetrit.
- 4 - keskmine-2: 19-30 tonni, 80-130 hj, 0,65-1,6 kuupmeetrit.
- 5 - Raske-1: 30-40 tonni, 100-200 hj, 1,2-2,5 kuupmeetrit.
- 6 - Raske 2: 55-60 t, 200-350 hj 1,6-4,0 kuupmeetrit.
- 7 - Eriti raske-1: 80-100 t, 300-500 hj, 2,5-6,3 kuupmeetrit.
- 8 - Eriti raske-2: 100-160 tonni, 400-800 hj, 5-10 kuupmeetrit.
Ekskavaatorid on raskem kui 8 rühma peetakse super raskeks ja kujundanud individuaalne.
Bucketi ehituse tüübi järgi
- Swing Mast - jäigad arease konstruktsioon. Kaablite masti põhjal peatada lohistamise ämber. Kopu kallutamine toimub ka kaablitega. Seda disaini nimetatakse dragliniks. Seda kasutatakse karjääri jalutuskäikete ekskavaatorid, kattuvad ja kaevandamine. Aga haarata ujuva ekskavaatori või ekskavaatori laaduri saab peatada ka mastile.
- Teleskoop buum on paigutatud sarnaselt autocraniga. Ekskavaatorites kasutatakse harva, kus buumi jäikust on vaja töö monotoonne olemus.
- Hinged nool. See oli tema kes kasutas Otis. Tülikas, raske, kuid vastupidav ja liikuv. Seda kasutatakse rasketes ja eriti rasketes masinates.
- Noole katkestamine. Kombinatsioonis hüdraulikamootoris kasutatakse enamikus universaalkskavaatoris.
Töötaja tüübi järgi
- Taldrik.
- Kopp kokkuklapitavad põhjaga.
- Kopp on sirge kühvel.
- Kopp - tagurpidi kühvel.
- Haarata.
- Ülekoormus ämber (kast).
Märkus 2: Kopp pannakse maapinnale, kopu kühveldab seda. Haara, mis koosneb kahest karbist ühendatud poolest, avati maapinnale, tõusute ajal lööb see pinnas ja slamid. Haara kasutatakse lahtiste ja vedelate pinnase puhul. Kast naudib juba lõdvestunud maad küljel.
Mini ekskavaatorid
Tüüpiline mini-ekskavaator on ekstra-margorraalne üksik-armastav ekskavaator radu liikuda murtud buumi ja hüdraulilise seadmega töö keha kaaluga kuni 1,5-1,7 tonni, mootori 10-20 hj. ja ämber kuni 0,15 kuupmeetrit. M. Bulldoser Dump Need on, kui nad on varustatud, siis "just see oleks": veojõude jõupingutusi ei piisa buldooseri jaoks. Aga varustatud ulatusliku lisaseadmete komplektiga (vt allpool).
Seal on mini ja täiesti beebi, mootori kuni 50 cm. Selliste loadide haldamiseks ei ole vaja traktori draiveri volikirja. Ostis - ja kasutage.
Hoolimata transpordivahenditest (liikluseeskirjad ei võimalda tahkete kattega ühistel teedel toimuvaid jälgitavaid autosid), muutuvad väikese konstruktsiooniga üha populaarsemad mini-ekskavaatorid oma majandusele, mitmekülgsusele ja tööle töötamise võimele.
Mida muud saab ekskavaatorit
Paljudes ekskavaatorites töötava hüdraulilise mootoriga saate selle asemel, et hüdraulilise haamri asemel ämber, hüdroporfraator, käärid, laenuvõtjad, kahvlid, klamber / haarde, ripps, hammaste-taldriku jne. Nii et üheliiniga ekskavaator, millel on murranguga nool, on üllatavalt universaalne masin.
Ekskavaatorid - Eesmärk ja klassifikatsioon
Ekskavaatorid (nimi pärineb ladina sõnad "ex" ja Caveo, "tähendab" toit ") erinevad suure lahtisi võimeid. Transportimise võimed on väikesed ja määratakse nende masinate raadiusega. Ekskavaatorid on jagatud mitmeks ettenähtud ja toitegruppidesse. Kui masin toodab kõiki toiminguid teatud järjekorras, korrates neid mõnede vahekauguste kaudu, viitab see katkestatud (tsüklilistele) tegutsemisseadmetele, kui kõik toimingud üheaegselt teostavad, on pidev masin. Põhiliste ekskavaatorite hulka kuuluvad üheliin ja pidevkskavaatorid - mitme armastav, kaabitsa ja freesimine.
Ühein-line ja multi-armastavad ekskavaatorid on maa ja ujuvad. Landseekskavaatorid on jälgitav, pneumaatiline, raudtee- ja jalgsi šassii.
Kõik ekskavaatori mehhanismid juhivad diiselmootorid, karburaator, auru- või elektrimootorid. Diisel- ja elektrimootorid on kõige ökonoomsemad. Mootori valik määratakse tingimused, milles ekskavaator töötab. Seega on karjääris töötavate ekskavaatorite juures kasulik kasutada elektrimootoreid, kuna elektrienergia on kõige odavam tüüpi energia tüüp ja teedeehituses töötavatel töödeldud, kus auto transporditakse sageli kohalt, on soovitatav kasutada diislikütust mootorid.
Kui kõik ekskavaatori mehhanismid juhitakse ühest mootorist, nimetatakse sellist draivi ühe mootoriga. Kui ekskavaatoris on iga mehhanism (või mehhanismide rühm) ajendatud eraldi mootor, selline draiv nimetatakse multi-mootoriks.
Selleks, et liikuda mootorist töömehhanismidele liikumise üleandmiseks, kasutatakse järgmisi kerakesi tüüpe: - mehaaniline, kui liikumine edastatakse võllide, käikude, usse auru, kettide käigud; - hüdrauliline maht, kus rolli draivi teostavad hüdraulilised pumbad, õli vesiniku ja hüdraulilised silindrid (või hüdraulilised balloonid); Naftakombainides ringleb vedelik energiasaatev energia pumbad hüdrauliliste rakkude (või hüdrauliliste silindrite), juhtivate töömehhanismide liikumise; - hüdromehaaniline, milles hüdrotransformaaterit kasutatakse energia edastamiseks kombinatsioonis mehaanilise ülekandega; - Electric, mida kasutatakse ekskavaatorites mitme mootorsõiduga koos mehaanilisega; - segatud, mis koosneb kahest tüüpi ajamitest, nagu mehaaniline ja elektriline.
Seega klassifitseeritakse ekskavaatorid: - liikumise meetodi (ujuva ja maa) meetodi kohaselt; - elektriseadme tüübi järgi (diislikütuse, karburaatori, elektrilise, diislikütuse jne); - mootorite arvu (ühe mootoriga, mitme mootor) abil; - draivi tüübi järgi (mehaaniline, hüdrauliline, hüdromehaaniline, elektriline); - Landikekskavaatorite alaseadme tüübi tüübi järgi (jälgitakse, pneumod, raudteel ja jalgsi šassiiga).
Kõiki ekskavaatorite rühma iseloomustab väiksemad märgid - mõõtmed, võimsus, ametisse nimetamine.
Ühemõjalised ekskavaatorid liigitatakse ametisse nimetamise teel.
On kolm põhirühma: - Ehitus ja universaalne - konteineri kopad kuni 3 m3, mis on ette nähtud mullatööde tootmiseks; - karjäär - ämbritega võimsusega 2 kuni 8 m3, mis on kavandatud töötama maagi ja söehoiuste arendamise karjääris; - Moonutatud - pesukomplektidega rohkem kui 6 m3, mis on ette nähtud kivide ülemise kihtide arendamiseks (avamine).
Ühe suurusega ekskavaatorid eristatakse neid erinevate töövahenditega.
Universaalsed ekskavaatorid on mõeldud töötama mitmesuguste vahetatavate seadmetega; Otsene ja tagurpidi kühvel, draanlock, kraana nool konksuga suspensiooniga või Graoniga, coprom jaoks vaia haakekonks jne.
Pool-universaalsed ekskavaatorid, välja arvatud peamised töövahendid on üks või kahte tüüpi täiendavaid vahetatavaid seadmeid (otsene kühvel, tagurpidi kühvel, dragline).
Erivõimas ekskavaatorid on ainult üks tüüpi seadmed, näiteks sirge kühvel.
Ühe suurusega ekskavaatorid. Singo-Universal Ekskavaatorit nimetatakse tsükliliseks tegevusmasinaks, mis on ette nähtud muldade ja muude materjalide kaevamiseks ja liikumiseks, kasutades ühte ämbritisest ühe tüüpi töövarustuse tüüpe ja teostama laadimis- ja muud teoseid teiste vahetatavate tööseadmete abil.
Ühe suurusega ekskavaatorid (joonis fig 72) koosnevad järgmistest peamistest sõlmedest: töötab juhtimisseade, pöördeplatvorm elektriseadmete ja peamiste kinemaatiliste linkide ja töövahenditega.
Jälgitud sõiduseadmed tagavad suure läbilaskvuse ja hea stabiilsuse, kui töötate ekskavaatorina.
Viimastel aastatel on ekskavaatorite vabastamine väikese ämblikuvõimsusega pneumoklireisil, millel on suur liikuvus ja manööverdusvõime, kui masinat liigutamisel ühest objektist teisele teisele on oluliselt suurenenud. Nõrk muldade töötamisel kasutatakse pikendust (või piklikumalt) jälgitavat seadmeid, mille juuresolekul vähendab erilist rõhku kohapeal ja parandab ekskavaatori passiivsust.

Joonis fig. 72. Ühe ekskavaatori Chera

Joonis fig. 74. Direct Shoveli skeem
Rotary platvorm põhineb rullide või spetsiaalse (palli või rull) tugipöörleva seadme raami alaealise seadme. Platvorm pöörleb horisontaaltasapinnaga šassii suhtes võrreldes.
Horisontaaltasapinnal oleva alusvarustuse pöörlemisnurk määrab ekskavaatori võimaluse täis-pöörde või mittetäieliku. Täis-kohaliku ekskavaatori pöörleva osa saab pöörata oma telje ümber 360 ° võrra.
Need masinaid pöörleva platvormi paigaldatakse kõik elektriüksused, juhtpaneel, töömehhanismid ja töövahendid on paigaldatud.
Töövarustus sisaldab komplekti ekskavaator sõlme töö keha (kopp, konks, haarata jne). Muld on välja töötanud ämber, pärast seda, kui nad liiguvad tera tühjenduspaigasse või sõidukisse. Sõltuvalt asendatavate seadmete tüübist kasutage töökeha jäigat või paindlikku suspensiooni. Töö iseloom määrab töövarustus: Direct Shoveli, tagurpidi kühvel, draani, kraana või haarata.
Ekskavaatori töötsükkel toimub järgmises järjestuses: mulla kaevamine; Pinnase täidetud kopa liigutamine tühjenduspaigale; pinnase mahalaadimine ämbrist prügilasse või transpordiseadmesse; Kopu liigutamine (platvormi pöörlemine) ettevaatlikult; Ämber langetamine järgmise kaevamisoperatsiooni ettevalmistamiseks.
Üksikute universaalsekskavaatorite indekseerimissüsteem. Masina indekseerimissüsteemi nimetatakse põhimõtteks, mis on paigutatud indeksi (kaubamärgi) struktuuri, mis tähistab ühte või mõnda teist ekskavaatorit ja kajastades selle põhiomadust. 1968. aastal tutvustati meie riigis uue ühe armastava universaalse ekskavaatorite indekseerimissüsteemi. Ekskavaatori indeksil on vastavalt neli põhinumbrit, mis näitab: masina mõõtmeline rühm, alakuuluva seadme tüüp, töövarustuse projekteerimise ja selle tüübi mudeli järjestuse number. Seega sisaldab ekskavaatori indeks teavet selle peamise iseloomuliku kohta. Niisiis, EO-3313 BTV on ekskavaator ühe line universaalne, kolmanda mõõtmelise rühma, pneumaatilise šassii, trossi suspensiooni töövahendid, 3. mudel, mis on möödunud teise moderniseerimise, teostatud tööks niiske troopika.
Direct Shovel - seadmed, mis on ette nähtud mulla arendamiseks ekskavaatori parkimise taseme kohal. Direct Shovel koos mehaanilise draivi (Joon. 74) koosneb järgmistest põhisõlmedest: trosside köis, ämber, käepide, nooled, sadula laager. Noole käepide on kinnitatud sadulalaagriga, millega käepide pöörab vertikaaltasapinnaga poomi suhtes ja muudab vastastikuse liikumise piki käepideme teljel. Kui pinnas on kaevamine, peab Kalle läbima joonisel fig. 74. Kopp tõuseb tõsteköie ümbriku peaplokkidega. Käepide rõhk viiakse läbi rõhu mehhanismiga, mis teostab ka käepideme pöördliikumist (tagasimakse). Universaalsed ehitus ekskavaatorid kasutavad köie ja käikude rulli (rõhumehhanismid).
Rõhumehhanismid jagunevad sõltumatuks, sõltuvaks, kombineeritud, survemehhanismi nimetatakse sõltumatuks, kui rõhujõudu saab suurendada või vähendada, olenemata ämbri tõstekaabli jõupingutuste ulatusest, st kui käepideme rõhk ämbriga on sõltumata ämbri tõstmisest. Kui survejõu ulatus sõltub tõste / purustatud ämberkaabli jõu suurusest ja surve vähendamiseks on võimalik ainult rõhu mehhanismi nimetatakse sõltuvaks.
Rõhumehhanismi nimetatakse kombineeritud, kui rõhk sõltub tõstekaabli pingutusest, kuid kui soovi korral võib rõhu mehhanismi sõltumatu osa suurendada.
Kalle Direct Shovel koosneb korpusest, kokkuklapitavad põhja koos korpuse ja vahetatavate hammastega. Hammastel on varre põgenenud lõpuni, mis on lisatud visori pesasse. Hambadest välja kukkumisest hoitakse pesades.
Viimastel aastatel on sirged kühvlid varustatud poolringikulaarse esiinaga ja visiiri kujul hammasteta. Sellise disaini ämber on palju lihtsam ja mul on mulla kaevamine minimaalne vastupidavus, mis suurendab loomulikult ekskavaatori jõudlust.
At ekskavaatorid sirge kühvliga kahte tüüpi käepidemed rakendatakse: ühe maapealne (sisetüüp) ja kahesuunaline (väline tüüp). Ühe jahvatatud käepide läbib poomi sees ja kaks bitit - väljaspool. Käepideme saab täita survevõlli juhtvõlli juhtide vastastikust liikumist ning pöörata koos ka survevõlli suhtes võrreldes vertikaaltasapinnaga sadulalaagriga. Käepideme konstruktsioon määratleb rõhu mehhanismi kujundamise. NSVL-is toodetud ekskavaatorite ekskavaatorid kasutatakse köie survemehhanismi üheaalse käepidemega ja kahe sidemega - kreemja peamehhanismiga.
Otselaputuse õlg on valmistatud lehtterase keevitatud kujunduse kujul. Käepide tüüp määratleb noolekujunduse. Nool on kahepalli üheaurusega käepidemega ja ühe maad kahe-bitise käepidemega.
Boomi ülaosas paigaldatakse plokid laagritele, mille kaudu ämber tõste tõste ja rõõm tõstetud köis läbib. Alumine ots (viies) nool on kinnitatud pöörleva platvormi külge ja seda saab pöörata, kui see muudab selle kaldenurga. Noole keskel on survevõll.
Reverse Shovel on seadmed, mis on ette nähtud muldade arendamiseks allpool ekskavaatori parkimise taset nupud, kaevikus, süvendid.
Tagurpidi kühvel (joonis fig 75) koosneb ämbrist, nooledest, käepidemetest ja kahejalgsest riba. Ämber kinnitatakse jäigalt käepidemele, mis kinnitatakse peldamatult noole ülemise otsaga. Tõmmates köis, käepide pöörleb vastupäeva, ämber kukkus pinnasesse (asend // positsioon // ja /// vastavad pandi asendisse ja mahalaadimise mulla ämber).

Joonis fig. 75. Reverse Shoveli töökava:
Maapealse maapinna protsessi. Üldine kaevanduskindlus R0 ületada aktiivse jõu W0, mis on suunatud ämber trajektoorile, mida saab lagundada lõikamisjõule ja mulla nihkumise WVI suunaline puutuja poolt ämber ja WB lükates jõudu, suunatud tavaliselt ämbri tipptasemele.
Hüdrauliliste ühe armastavate ekskavaatorite peamised parameetrid on: ämbervõimsus Q, ekskavaatori mass, masina võimsus N, ekskavaatori toimingud, samuti surve- ja pumba jõudlus.
Ekskavaatorite hüdraulikakettides, püügivahendite ja tera tüübi püsiva jõudluse pumbad (rõhul 12-16MPA) ja kolviga rõhul kuni 30 mp ja muutuva jõudluse pumbad, eelduseks on aksiaalne -Piston.
Püsiva jõudlusega pumbad on YCI piinamise lihtsad pumbad, kuid ei anna mootori võimsuse täielikku kasutamist kõigis režiimides. Performance varieeruva pumbad Semeline ratsionaalsem ja stabiilsem kasutamine ekskavaatorid.
Tootlikkus ja tehnoloogilised skeemid ühe armastava ekskavaatorite töö jaoks. Ühe rea ekskavaatorite tootlikkus määrab paljude teguritega: masina konstruktsioon, maapealsete tööde korraldamise tase, pinnase seisund ja kvaliteet ning tapmine, masina draiveri kvalifikatsioon ja masina tehniline seisukord.
Joonisel fig. 77, B on Draghuni töö skeem reservi väljavõtte ehitamisel reservi väljavõtte ehitamisel. Mulla kaevamine viiakse läbi kahele inasele; Ühel neist on järgmine mullakiht pumbatakse ja silutakse buldooseriga ja teisel - värskelt lisatud pinnas tihendatakse keha eemaldatava masinaga.
Multifungalkskavaatorid. Multifungalkskavaatorid on maapealsete masinatega, millel on multi-pinge ahel või pöörleva ratastega ämbritega, jäigalt ümber perimeetri ümber. Nad kohaldavad: teedeehitustöödel; Kui kaevamine marinaali, kanalite ja osade paigaldamiseks torude või aluste paigaldamine, juhtpaneel, käigukast, töökeha paigaldatakse stack raam.
Märge. EO-1621 ekskavaatorid (E-153A), EO-1627 (E-1514) on varustatud täiendavate buldooseri seadmetega: tolmu laius 2000 mm, kõrgus on 680 mm, lõikesügavus on 500 mm. EO ZZPB ekskavaatorid (E-302) on varustatud Draghun-seadmetega järgmiste parameetritega: Buumi pikkus on 7500 mm, buumi nurk on 40 °, lõikamise sügavus 4450 mm, lõikamise raadius 6500 ja 10 100 mm , mahalaadimise kõrgus, 3900 ja 6300 mm, vastavalt mahalaadimisega, vastavalt 6390 ja 8300 mm.
Ühe ekskavaatori - mitmesuguseid ekskavaatorit, pinnase arendamiseks mõeldud tsüklilise tegevuse mänguautomaad (kaevamine), pinnase liikumine ja laadimine. Tööorgan on teise kuupmeetri mahu liikuv ämber, mis on kinnitatud noolele, käepidemetele või köiedele. Kopp on laaditud tõttu liikumise tõttu mulla arenenud. Sellisel juhul jääb ekskavaatori korpus pinnase suhtes fikseeritud - veojõujõud luuakse ekskavaatori mehhanismid. Sellel omaduste ekskavaatorit staapelist ja laadurist, kus ämber laadimisel on veojõujõud loodud masina korpuse liigutamise teel.
Ühe suurusega ekskavaator on kõige levinum maavärinad, mida kasutatakse mineraalainete ehitamisel ja kaevandamisel. Vastavalt tööliigile on ämbriste hammaste suunas kaks peamist ekskavaatoritüübi - tagurpidi või sirge kühvel. Straign kühvliga ekskavaatorid kasutatakse ainult karjääri mägemassi laadimisel prügilavagunitesse või maagi või teiste rock-karjääritarkvara laadimiseks. Sellise ekskavaatori eristusvõime on ämbri avamise põhja.
Ühe suurusega ekskavaatorid liigitatakse šassii tüübiga, sõidumeeriku tüübile, töövarustuse tüübile, töövarustuse pöörlemise võimalus toetava pinna suhtes.
Võrdluspinna suhtes võrreldes töövarustuse pöörlemise võimalus
· Täispöörde
Täistööajaga ekskavaatori skeem
Töövarustus, draivid, masina draiveri ja mootor on paigaldatud pöörleva platvormile, mis omakorda paigaldatakse šassiile refluksiseadme (OPU) abil ja seda saab selle suhtes pöörata üheski suunas mis tahes nurga all. Osade šassii hüdraulikasüsteemi ja pöördeplatvormi täis-pöördekskavaatorid on ühendatud kasutamisega kollektori, mis võimaldab piiramatu arv revolutsioone ühes suunas.
· Inbolk-kiirus
Mittetäieliku ekskavaatori skeem rattaraktorite šassiis 1. Traktori kinnitatud ekskavaatoriraam; 2. Rotary kolonn; 3. Nool; 4. Käepide; 5. Juhatuse juhtimine hüdrauliline silinder; 6. Hüdrauliline silindri käepideme draiv; 7. akvarell hüdrauliline silinder; 8. ämber tagurpidi kühvli asendis; 9. Kopu valik paremal kühvelisse asendis; 10. Vahetatav lasti konks; 11. Buldooser Dump; 12. Kaugtoetused
Töövarustus on fikseeritud šassiile pöörleva kõlariga. Paljudel selliste tüüpi masinatel on pöörleva kolonn paigaldatud põikjuhenditele, mis võimaldab teil liikuda koos tööriistaga paremale, järgneva jäiga fikseerimisega töövarustuse mugavam asendisse. Tööseadmete käik toimub algsel asendist 45-90 kraadi nurga all. Mootori, mehhanismid, juhikabiin asetatud mitte-keerates šassii. Praegu on traktorite rippuvad ekskavaatorid sissetulevad
Šassii tüübi järgi
· Rippuvad traktorite
Põhiraamina kasutatakse traktorit, kõige sagedamini rattad. Sntheble ekskavaatori seadmed on paigaldatud (harvemini küljelt) traktori spetsiaalne raami. Kõige tavalisemad on klassi 1,4 traktorid rippuvad ekskavaatorid. Bucketi iseloomulik maht on 0,2-0,5 mi. Kasutatakse väikeste muldmesemete või laadimise töö tegemiseks, kõige sagedamini inseneri võrkude parandamisel. Töövarustuse disain võimaldab teil kiiresti ämbrit otse või tagurpidi kühveldada. Kopp saab asendada haarata, veoautode või konksuga. Ajam kasutab mootori baastraktorit. Hüdraulika töövarustuse draiv. Suhteliselt suure kiiruse tõttu võib pöördumine töökohal kiiresti jõuda, mis asub 20-30 km kaugusel baasi alusest. Transpordi ja buldooseri teostamiseks saab kasutada ka riputatud ekskavaatori seadmetega traktorit.
· Auto šassiil
Põhiraamina kasutatakse veoautot, kõige sagedamini suurendas passipüüdlikkust. Neil on suur liikumise kiirus. Kandke juhtudel, kus on vaja suurt liikuvust: sõjalistes küsimustes (inseneri väed, maanteed) päästetööde tegemisel teede ehitamisel, puhastusjaamade ehitamisel. Töövarustus - valdavalt tagurpidi kühvel. Teleskoop-noolega ekskavaatorid ja pöörleva ämber on toodetud, võimaldades teil kiiresti liikuda otsest kühveldada tagurpidi. Ajamit saab kasutada nii alusauto mootori kui ka pöörleva platvormile paigaldatud eraldi mootori mootori.
· Pneumoad
Ekskavaatorid on oma spetsiaalne šassii, mis põhineb pneumaatiliste rehvidega ratastel. Kõige sagedamini on täidetud. Stabiilsuse suurendamiseks ja sulgemise vältimiseks ämbril laadimisel on kaugtoetused. Kas kiirus kiirus kuni 30 km / h. Trucks saab puudutada kuni 40 km / h kiirusel. Patsient nõrga muldade piiratud. Saadaval laia dimensioonide rühmade - alates mikroekscavators ämber maht 0,04 mi kuni raske ratasekskavaatorid - ämber mahuga kuni 1,5 mi. TÖÖ spetsiifiliste tänu: Kittlers, kaevikute, planeerimise töö - töövarustus - valdavalt tagurpidi kühvel. Võib kasutada haarata, kaevandava haarde, hüdraulilise haamriga mulla lõdvendamiseks. Haav on laialt levinud erinevate ehitus- ja remonditööde tegemisel.
Rattavedude šassii võib teostada nii töövarustuse mootorist mehaaniliste kui hüdrauliliste ülekannete (hüdrauliliste mootorite) ja ühe mootori kaudu.
· Roomik
Ekskavaator Demag Bagger. Täitmine: Direct Shovel. - Üks suurimaid hüdraulikakskavaatorit oma klassis
Ekskavaatorid on oma spetsiaalne šassii jälgitava tõukejõuga. Täiuslik täispööramine. Neil on suur massiga suur mass ja madal eriline surve. Nad võivad töötada nõrkade ja ülekoormatud pinnasetes, kaasa arvatud tupar-pinnas. Kiirus on 2-15 km / h. Töökoht transpordib spetsiaalsete haagiste traktorite.
Koppamise mahtude tööpiirkond on väga lai: mini-scab-ist ämbri mahuga 0,04 μ kuni karjääri mahuga 10 MI ämber. Samuti on eriti rasked karjäärivõimalused ekskavaatorid, mille maht on DEMAG (Saksamaa) toodetud 26 MI ämber.
Tööseadmed: Direct Shovel, Reverse Shovel, Dragine. Seda saab kasutada koos haarata, juudi haarde, hüdraulilise haamriga mulla lõdvendamiseks. Nad olid laialt levinud ehituses ja kaevandamise ajal. Mitmed CATERPILLARi ja pneumaatiliste ekskavaatorite mudelitel on ühtne pöördeplatvorm ja töövahendid.
· Kõndimine
SWIVEL platvorm seadmete käiakskavaatoriga on paigaldatud tugiplaadi. Käpad on seotud pöörleva platvormiga, mis tõstatatakse ekskavaatori tõstetud (ärge puudutage pinnast). Ekskavaatori liikumisega põhinevad käpad maapinnal. Samal ajal eemaldatakse tugiplaat mullast. Ekskavaator liigub ühe sammu edasi (mõnede mudelite puhul on võimalik tagasi liikuda). Pärast seda tõusevad käpad ja tagastatakse algse positsiooni. Jalutuskäigu liikumises suured karjäärikesksed, kellel on ämber 15 MI - 40 mi ja noolega kuni 65 m - 150 m. Tööseadmed - Dragine. Running ekskavaatorid viiakse läbi valdav töö (maavarade puhastamine tühja tõug), \u200b\u200bsamuti kaevandamine ja liigutades neid prügila (kuni 40m kõrguse). Minerals laadimine jalutuskäikete eemaldamist ei saa sõidukites läbi viia.
· Raudtee
Raudteeplatvormi kasutatakse ekskavaatori šassiiina. Kasutatakse raudtee käes töötamiseks. Omama ämbrit kuni 4 mi. Rotary platvormi ja seadmed on sageli ühendatud roomikekskavaatorid.
· Ujuv
Töö seadmed (dragline või Graon) on paigaldatud Pontoonile. Kandke laadimise ja mahalaadimise, liivakaevandamise, veekogude kruusa, leotuste ja süvendustööde kruusa. Grabidega varustatud ujuvatest kraandest iseloomustab ujuvakskavaatorid väiksema kõrguse ja lihtsustatud noole disaini võrra.
Mootori tüübi järgi
· Aurukskavaatorid
Mootorina kasutatakse aurumasina. Jagati 20. sajandi alguses. Praegu ei ole välja antud. Aurumasina ja ekskavaatori liigse seadmete hetkekiiruse omadused on hästi koordineeritud (aurumasin saab arendada pöördemomenti isegi ümberpööratud võlliga), mis lihtsustab mehaanilisi ülekandeid.
· Ekskavaatorid sisepõlemismootoritega
Kõige tavalisem tüüp. Ekskavaatoril on oma mootor, kõige sagedamini diisel. See tagab töö autonoomia. Kaasaegsetesse ekskavaatoritesse paigaldatud mootorid on väga lai (vt mõõtmete rühma).
Sisepõlemismootori ja ekskavaatori tööseadmete hetkekiiruse omadused ei ole kokku lepitud. Eelkõige ei saa sisepõlemismootor välja töötada võlli väntvõlli pöördemomenti. See nõuab rakendamist sobitamise käiguvahetuse mehaaniliste ekskavaatorite kohta (siduriühendused, käigukastid, hüdrotransformaaterid). Hüdrauliliste ekskavaatorite tunnustust pakuvad hüdraulilised käigud.
· Elektrilised ekskavaatorid
Tööseadme juhtimiseks kasutatakse elektrienergia mootoreid, mis saavad energiat välist võrgus või oma diisel-elektriseadmest. Karjääri ekskavaatoritele kasutatakse elektrilist drive toiteallikaga. Sellised ekskavaatorid on ökonoomne ja ei saasta karjääri atmosfääri. Ujuvate ekskavaatorite puhul kasutatakse elektrienergia draivi oma diislikütuse seadmest. Nagu aurumasinad, arendab elektrimootor pärsitud ankurdusmomenti pöördemomenti, nii et elektrielemesekskavaator ei vaja keerulisi mehaanilisi ülekandeid.
Ekskavaatorid, kes töötavad plahvatusohtlikus keskkonnas (kaevandustes) esmase mootoriga ei ole. Nende hüdraulikaseadmete toiteallikaks on kõrgsurve vedelik välise õlitehase.
Mehaaniliste püügivahendite tüübi järgi (operatsiooniseadmete draivid)
· Grupi mehaanilise kaabli draiviga (mehaaniline)
Traktsiooni jõupingutusi tööorganitele edastatakse köiete (või kettide) liikuvate luigendite abil. Lebetok Drive viiakse läbi ekskavaatori mootorist mehaaniliste käiguvahendite abil (käik, kett, hõõrdumine, uss).
Universaalse ekskavaatori mehaanilise kettaga on varustatud kolme trumli vintsiga. Booster buum trummel kasutatakse sõita (tõstmine ja langetamine) nooled. Tõsterummel kasutatakse ämbrit tõstmiseks (või käepide tagastamise ajal tagurpidi kühvel). Traktsioonirumlit kasutatakse ämbrise tõmbamiseks ekskavaatorile (kui Draglock, tagurpidi kühvel). Otselahuva käitamisel on veokirum seotud rõhupea mehhanismiga.
Mehaanilise kaabli draivi kasutati ekskavaatorites laialdaselt varem. Kaasaegsete mudelite puhul vähendatakse selle kasutamist järgmistel põhjustel:
- · Mehaanilise kaabli draiviga ekskavaatorid on keeruline ja sisaldab suurt hulka kiireid tooteid (hõõrdevili, piduri lindid, köied).
- · Rope Drive pakub piiratud arvu sõltumatute tööseadmete elementide sõltumatuid nihkeid;
- · Rope Drive on automatiseeritud tehniliselt raske teha;
- · Rope draiv ei paranda täielikult töövarustuse elemente määratud asendis.
Kaasaegsetel mudelitel kasutatakse köie mehaanilist draivi ainult draghuni või graper.
· Individuaalse elektrikaamera vintsidega (elektromehaaniline)
Traktsiooni jõupingutusi tööorganitele edastatakse köiete (või kettide) liikuvate luigendite abil. Iga vintsi ja abistamismehhanismide draivi viiakse läbi individuaalse elektrimootori poolt. Sellist draivi rakendatakse rasketel karjääridel (sh kõndimis-) ja tööstusekskavaatorid.
· Hüdraulika draivi
Hüdraulikakeskuse ekskavaatorid ( hüdraulilised ekskavaatorid) Töövarustuse elementide pingutused on loodud hüdrauliliste silindrite ja hüdrodiamootorite poolt. Ekskavaatori mootor toob kaasa hüdraulilise pumba pöörlemise, mis loob töövedeliku rõhu hüdraulilise süsteemi rõhukeskuses. Hüdrauliliste levitajate (hüdrodaaldigaavide) hüdrauliliste turustajate kaudu on need ühendatud hüdraulika süsteemi töö- või äravoolu maanteedega, mis tagab töövahendite liikumise. Neutraalses asendis (hüdrauliliste silindrite lukustatud õõnsustega) on töövarustuse asukoht fikseeritud. Et transportida ekskavaatori abiga puksiiriga, võimalus tõlkida buum hüdraulika silindri ja hüdromeetri pöörlemismehhanismi neutraalne transport ("ujuva") režiimi.
Praegu on hüdraulikakskavaatorid valdava jaotuse.
Ekskavaatorite klassifikatsioon
Ekskavaatorid nimetatakse maapinna masinad, mis on ette nähtud pinnase kaevamiseks ja liigutamiseks. Kõik ekskavaatorid on jagatud kaheks suureks rühmaks: pidev tegevus - multi-armastav ja perioodiline (tsükliline) tegevus - ühe reaga.
Mõlema tegevuse pidevad ekskavaatorid - mulla kaevamine ja selle liikumine toimub samaaegselt; Perioodiliste toimingute ekskavaatorid täidavad neid operatsioone järjestikku, katkestades kaevamise pinnase liikumise ajal kaevamise ajal. Seega tööaega masin, mille jooksul pinnase valitakse, rohkem pidevatesse ekskavaatorid ja nende tulemuslikkus on kõrgem kui perioodiliste ekskavaatorite. Sellest hoolimata on ühe armastava ekskavaatorid laiemad, mille eeliseks on nende mitmekülgsus, s.o võimalused rakenduse võimalusi nii mullatöödel kui ka laadimis- ja mahalaadimistöödel ning kõigis kõvades, sealhulgas kivimites (esialgse plahvatusega), pinnas. Multifungalkskavaatorid kasutatakse peamiselt siis, kui kaevamine mittemetalsete materjalide kaevandamine karjäärides homogeensetes muldades, millel ei ole kivi kandmist.
Nii ühe line kui ka mitme armastavad ekskavaatorid on maa ja ujuvad.
Land ekskavaatorid on jälgida, pneumaatiline ja kõndimine (viimane kasutatakse ainult ühe armastava ekskavaatorid) sõidutehnika.
Ekskavaatori mehhanismid juhivad diiselmootorid, karburaator, auru- või elektrimootorid. Valdav enamus kaasaegsetest ekskavaatoritest on varustatud diiselmootorite ja elektrimootoritega, mis on kõige ökonoomsemad. Vähem sageli kohaldatakse karburaatori mootoreid.
Mootori valik määratakse tingimused, milles ekskavaator töötab. Niisiis, ekskavaatoritele, kes töötavad raua ja maanteede ehitamise kallal, on see, kus auto peab olema suhteliselt sageli transporditakse kohalt, diiselmootorid. Ekskavaatoris, mis töötavad pidevalt samas kohas, näiteks karjääri mittemetalsete materjalide jne jne, on kasulik kasutada elektrimootorid, kuna elekter on kõige odavam energiatüüp. Lisaks on teenus lihtsustatud ja vajadust püsiva pakkumise järele masina kütusega on lihtsustatud.
Seetõttu diiselmootorid on sageli paigaldatud ekskavaatoritele ämbritega mahuga kuni 3 m3 ja elektrimootorid on sageli paigaldatud ekskavaatoritele.
Kui kõik ekskavaatori mehhanismid juhitakse ühest mootorist, nimetatakse sellist draivi ühe mootoriga. Kui ekskavaatoris on iga mehhanism (või mõned mehhanismid) ajendatud eraldi mootor (tavaliselt elektriline), nagu draiv nimetatakse multi-mootor.
NSVLis, üherattalised akskavaatorid, millel on ühe mootoriga ühe mootoriga koos ämbritega mahuga kuni 2,5-3 m3, välismaal - kuni 4-4,5 m3. Praegu valmistuda tootmise ekskavaatorid
diesel-elektrilise multi-mootorsõiduga, mille käigus on paigaldatud ämbrid 1,6 m3 (E-1602). Lisaks tootmise ekskavaatorid multi-istric hüdraulikaseadmega, mida kasutatakse kopad mahuga 0,25 m3 (E-2513 ja E-2514) ja hüdraulilise ekskavaatotorsüsteemi tootmise ämber 0,4-0,5 m3 valmistatakse.
Mitme mootori draivi levikut on eriti seletatav asjaoluga, et ekskavaatori mehhanismid viiakse läbi eraldi ühikutena, mida saab paigaldamisel paigaldamisel kergesti paigaldada ja nende parandamise käigus asendada (kokkuparandusmeetodiga). Lisaks võimaldab see disain rakendada erinevaid masinate sama või peaaegu identseid (ühtseid) sõlme, mis võimaldavad kohandada suuremaid spetsialiseeritud tootmist ja vähendada varuosade vahemikku.
Liikluse ülekandmiseks mootorist töömehhanismidele kasutatakse järgmisi sõidutüüpi:
- mehaaniline, kui liikumine edastatakse šahtide, käikude, usside auru, kettide käigud;
- hüdrauliline mahuhulk, kus rolli draivi teostab hüdraulikapump (üks või mitu), õli vesinikupumbad (või hüdraulilised silindrid);
- naftatorujuhtmetes ringleb vedeliku, mis edastab energiat hüdraulilistesse rakkude (või hüdrauliliste silindrite) pumpadelt, juhtivaid töötajate mehhanisme liikuvaid mehhanisme; See meetod põhineb vedeliku varal mitte tihendada;
- hüdrodünaamika, kus energiaülekande jaoks kasutatakse turba või turborafo; Seda kasutatakse tavaliselt kombinatsioonis mehaanilise mehhanismi mehhanismide ja liikumiskiiruse automaatse juhtimise mehaanilise käitamisega, sõltuvalt koormuse väärtusest (koormuse suurenemisega väheneb töömehhanismide liikumise kiirus ja vastupidi);
- Electric, mida kasutatakse ekskavaatorites mitme mootorsõiduga koos mehaanilisega; See draiv võimaldab reguleerida ekskavaatorimehhanismide liikumise kiirust, muuta automaatselt kiirust sõltuvalt koormustest, samuti ühendada tööliigutustest;
- segatud, mis koosneb kahest tüüpi ajamitest, nagu mehaaniline ja elektriline.
Mehaaniline draiv on kõige levinum, nii et selle kohalolek ekskavaatorile ei ole masina nimel täpsustatud ja see on tavaliselt ainult mootori tüüp, näiteks diislikütuse ühe rea ekskavaator, mille paak on 0,5 m3. Kui kasutatakse teise liikide draivi, on see näidatud ekskavaatori nimel, näiteks diisel-elektrielemesekskavaator, see tähendab ekskavaatorit diiselmootoriga elektriseadmete ja elektriseadmega.
Kõik ülaltoodud viidatakse perioodiliste toimingute ekskavaatoritele (SnODOKSHOV) ja pidevatesse ekskavaatoritesse (Multi-maht).
Seega eristavad ekskavaatorid:
1) liikumise meetodi (ujuva ja maa) meetodi kohaselt;
2) elektriühenduse tüübi järgi (diislikütuse, karburaatori, elektrilise või auru mootoriga);
3) mootorite arv (ühe mootor, mitme mootor);
4) tüüpi draiviga (mehaaniline, hüdrauliline volumeetriline, hüdrodünaamiline, elektriline, segatud);
5) maakskavaatorite sõidutehnika tüübi järgi (jälgitakse, pneumod).
Lisaks loetletud iseloomulikule klassifikatsioonile iseloomustavad iga ekskavaatorite rühma väiksemaid märke - mõõtmed, võimsus, ametisse nimetamine.
Üheinimesekskavaatorid jagunevad kolmeks põhirühmaks: - ehitus, ämbritega mahuga kuni 3 m3, mis on ette nähtud ehitamisel ja mahalaadimiseks ja mahalaadimiseks;
- karjäär, ämbritega, mille võimsus on 2-8 m3, mis on kavandatud töötama maagi ja kivisöede ladestamise arendamise karjääri ja kivikividega;
- Ümbritsev, kopad, mille võimsus on üle 6 m3, mis on ette nähtud eelkõige kivide ülemise kihtide arendamiseks (avamine), mis hõlmab mineraalainete mahutite (kivisüsi, maagi).
Vesindajakskavaatorid eristuvad pikliku töövahenditega, mis võimaldab maapinda suurema kaugusel tootmise paigutamisest maha kukkuda. See masinate rühm sisaldavad ka võimas jalutuskäiguskavaatorid - draglines, mida kasutatakse kaevandamisel, et katta kivide ülemine kiht arenenud ruumi, samuti suure hüdraulilise konstruktsiooniga.
Ühe suurusega ekskavaatorid tuleks eristada nende kasutamisega erinevate töövahenditega.
Universaalsed ekskavaatorid nimetatakse autodeks, millel on vähemalt neli tüüpi vahetatava töövahendeid. Ehitus Ekskavaatorid on tavaliselt mitmekülgsed ja üks tüüpi töövahendeid saab asendada teise kasutamise ajal.
Eri-kõne ekskavaatorid, millel on ainult töövahendite auaste. Reeglina toodetakse reeglina konteineri kopad üle 6 m3, aga ekskavaatorid viimaste paagi ämbritega (näiteks maa) võivad olla erilised.
Praeguses raamatus kirjeldatakse kodumaise tööstuse toodetud üheliinilise ehitusmaakskavaatorit, täistööajaga ja mittetäieliku.

Joonis fig. 1. Ühtse ekskavaatori skeemi:
1 - sõidutehnika, 2 - pöörlev platvorm,
Ekskavaatorit nimetatakse masinaks, mis toimib mittetahkete või purustatud kivide mehaanilise kaevandamise jaoks (joonis fig 2).
Koos eraldamise osa kivist massiivist, ekskavaator liigub toodetud tõug teatud kaugusele transpordile või enne prügila, kui toodetud kivi lähtestatakse prügimäele (kui kaevamine kittlers, Clay Bille'iga koonuses või harjas).
Esimese ühe suurusega ekskavaatori ehitamine viitab 1836-le. Mõnevõrra hiljem, 1860. aastal, oli multi-tõstetud ekskavaator.
Eelrevolutsioonilises Venemaal ilmus esimene ühemõõtkskavaator palju hiljem - 1900. aastal. Väikese arvu selliseid ekskavaatorid anti välja raudteeosakonna liivakarjääride arendamiseks. Paljud armastavad ekskavaatorid sel ajal ei toodetud täielikult.
Nõukogude Liidus sai ekskavaatori ehitus võimas areng.
Tegemismeetodi ja tööprojektide asukoha järgi jagatakse ekskavaatorid järgmistele põhiklassidele: üheliin, kaabel, multi-armastav.
Töökorras liikumismeetodi kohaselt jagatakse need ekskavaatoriteks raudtee- ja roomikuga.
Viimastel aastatel on raske inseneri tööstus muutunud ülekoormatud raskeveokitega ühe valgusskavaatorid, mis liiguvad töökorras, kasutades kõndimismehhanismi.
Morents-line ekskavaatorid ehitatakse ka bonovaskulaarse (nn ekskavaatoriga) töö eest jõgede, kanalite ja muude reservuaaride süvenemise jaoks. Üks selliste ekskavaatorite sorte on kulla kaevandamistööstuses kasutatavad lohud.

Joonis fig. 2. ühe suurusega ekskavaator Caterpillaril.
Ekskavaatorid on varustatud otsese või vahelduva voolu, auru masinate või sisepõlemismootorite elektromotoritega.
Et Aturentaarne: - ekskavaatori operatsioon